课程价格 :
¥1099.00
剩余名额
0
-

学习时长
10周 / 每周至少8小时
-

答疑服务
专属微信答疑群 / 讲师助教均参与
-

作业批改
课程配有实践作业 / 助教1V1批改
-

课程有效期
一年 / 告别拖延,温故知新

- 1-1:课程学习指南
- 1-2:【开课仪式】
- 1-3:【视频】讲师课程介绍
- 第1章: 自动驾驶系统中的传感器与时序闭环
- 2:【课件】L1 自动驾驶多传感器设计.pdf
- 第1节: 自动驾驶为什么需要多传感器
- 3:【视频】自动驾驶系统传感器需求
- 第2节: 传感器的物理特性
- 4:【视频】传感器的物理特性
- 第3节: 感知传感器的成像机制
- 5-1:【视频】Camera成像机制
- 5-2:【视频】Lidar成像机制
- 5-3:【视频】Radar成像机制
- 5-4:【视频】超声波雷达成像原理
- 第4节: 定位传感器工作原理简介
- 6:【视频】建图定位多传感器分析
- 第5节: 自动驾驶传感器系统设计
- 7:【视频】整车传感器系统分析
- 第6节: 多传感器系统的时序闭环
- 8-1:【视频】时序闭环构建
- 8-2:【视频】成像同步机制
- 第2章: 多传感器的标定
- 9:【课件】L2 传感器标定.pdf
- 第1节: 为什么需要标定传感器
- 10:【视频】如何确定多个传感器检测到的物体是同一个?
- 第2节: 非线性优化知识回顾
- 11-1:【视频】非线性优化基础
- 11-2:【资料】非线性最小二乘问题的求解方法.pdf
- 第3节: 从Camera成像过程谈Camera内参标定
- 12:【视频】camera内参标定
- 第4节: 多传感器之间的外参标定
- 13:【视频】传感器外参标定
- 第5节: 外参在线动态修正
- 14:【视频】外参在线修正
- 第6节: 实践:标定工具箱
- 15-1:【作业】Project I 传感器标定算法
- 15-2:【作业代码】homework
- 15-3:多传感器融合感知第二章优秀作业分享.pdf
- 15-4:【作业】第二章
- 15-5:多传感器融合感知 第二章作业思路分享-Zachary
- 第3章: 多传感器后融合算法
- 16:【课件】L3 后融合感知算法.pdf
- 第1节: 融合问题定义及背景
- 17:【视频】融合问题定义及背景
- 第2节: 后融合系统输入输出
- 18:【视频】后融合输入及算法设计思想
- 第3节: 预测及目标关联
- 19:【视频】目标及预测关联算法
- 第4节: 后融合算法:Kalman Filter与Extented Kalman Filter
- 20:【视频】基于KF与EKF的后融合
- 第5节: 运动学模型建模与选择
- 21-1:【附加资料】运动学模型建模与选择
- 21-2:【视频】 运动学模型建模与选择
- 21-3:【资料】运动模型建模与选择.pdf
- 21-4:【论文】Advanced Motion Models.pdf
- 第4章: 多传感器前融合算法
- 22:【课件】L4 Early Fusion Algorithm.pdf
- 第1节: 前融合介绍
- 23:【视频】前融合介绍
- 第2节: 前融合算法:MV3D, ContFuse, CRFNet
- 24:【视频】激光雷达与相机的前融合,相机与毫米波雷达的前融合
- 第3节: 前融合与后融合的关系
- 25:【视频】实际系统中前融合与后融合的关系
- 第4节: 场景理解:自动驾驶遇到的新问题
- 26:【视频】场景理解
- 第5节: 融合系统设计
- 27:【视频】融合感知系统的设计
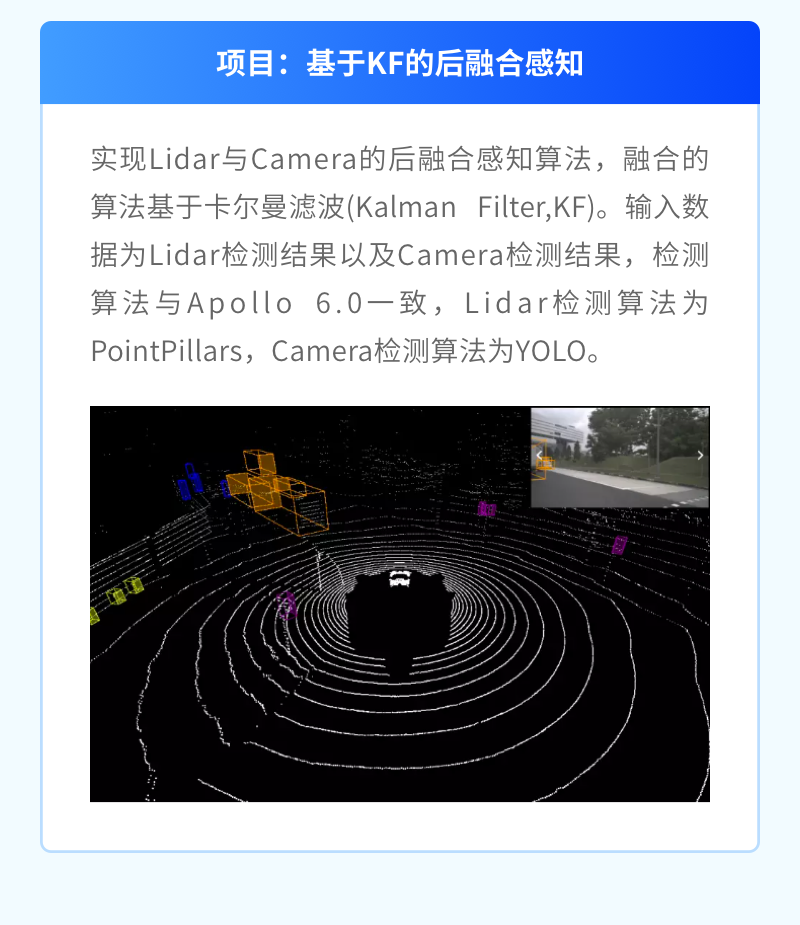
- 第6节: Project One ——基于卡尔曼滤波的融合感知
- 28-1:第四章作业思路讲解-助教Zachary.pdf
- 28-2:【视频】作业说明
- 28-3:fusion-based-perception-main.zip
- 28-4:【作业】Project One
- 28-5:第四章优秀作业分享-wangdaw.pdf
- 第5章: 如何预测目标级障碍物未来轨迹
- 29:【课件】L5 Prediction System.pdf
- 第1节: 预测问题定义
- 30:【视频】预测问题是什么
- 第2节: 机动车与行人的预测算法
- 31:【视频】机动车与行人的预测方法
- 第3节: 预测系统构建
- 32:【视频】如何构建预测系统
- 第6章: 融合感知系统工程化:在线及离线系统构建
- 33:【课件】L6&7 在线与离线系统设计
- 第1节: 基础结构设计:输入frame,输出fusion结果
- 34:【视频】感知系统的数据
- 第2节: 构建以datapool和threadpool为基础的pipeline执行架构
- 35:【视频】在线系统设计
- 第7章: 融合感知系统工程化:离线系统构建
- 第1节: 如何构建分级性能感知系统评估体系
- 36:【视频】感知性能评估体系
- 第2节: 如何构建数据闭环及离线工具链
- 37:【视频】如何构建数据闭环及离线工具链
- 第8章: Apollo感知预测模块仿真实验
- 38:【操作手册】Apollo感知预测仿真.pdf
- 第1节: 激光雷达感知
- 39-1:【视频】CNNSeg感知实验
- 39-2:【视频】PointPillars检测
- 第2节: 相机感知
- 40-1:【视频】红绿灯识别
- 40-2:【视频】车道线检测
- 40-3:【视频】相机障碍物检测
- 第3节: 融合感知
- 41:【视频】融合感知