

 您已经是《三维点云处理》-学员,是否购买最新一期?
您已经是《三维点云处理》-学员,是否购买最新一期?

- 本课程包括:
- 3个月群内答疑,讲师助教及时解答
- 课程有效期为1年,建议合理规划学习
- 课程配有作业练习,助教一对一批改
- 班主任带班,严格督学,告别拖延
- 根据学习情况颁发结业证书、优秀学员证书

黎嘉信
高仙机器人深度学习与融合感知负责人。2014年清华大学本科毕业,2018年新加坡国立大学博士毕业,师从陈本美教授和Lee Gim Hee教授。此前历任Motional感知科学家和夜间驾驶负责人、字节跳动Al Lab视觉科学家。以第一作者发表多篇计算机视觉/机器人顶级会议论文,包括CVPR、ICCV、ICRA、IROS等。
从技术角度看,在三维重建、SLAM、机器人感知等多个领域,三维点云都是最简单最普遍的表达方式。应用角度上,从无人驾驶中的激光雷达到微软Kinect、iPhoneFacelD及AR/VR应用,都需要基于点云的数据处理。三维点云技术应用广,需求庞大,但技术难度高,更难找到系统学习三维点云的资料,自学要多走很多弯路。通过课程学习,能够高效入门,系统学习点云多种算法。
课程目标
O1 点云处理算法原理与细节
深入理解各种经典点云处理算法,比如KD-Tree,Octree等最近邻搜索算法,GMM,Spectral Clustering等点云聚类算法,Mean Shift,RANSAC等模型拟合算法。Pointnet系列深度学习方法等。从最基础公式出发,详解算法实现各个步骤。
O2 点云处理算法实践及应用
在真实数据集中应用自己复现的算法,对于算法各个部分理解更加深入。根据可视化结果调整算法参数,优化算法结果,并增强自己的实践能力。
O3 工程项目思维与能力
对三维点云领域有全方位的认知,了解三维感知的各种问题及方案思路。了解各种算法的应用场景和实际效果,能够在不同的应用场景挑选不同的适配方案。
课程脉络
-
01
1
首先从点云数据的概念出发,将数据处理分成多个模块,包括最近邻算法,点云聚类,模型拟合,目标检测等,不仅详细推导了每个公式,并且分析了算法思路。
-
02
2
点云学习因其在计算机视觉、自动驾驶、机器人等领域的广泛应用而受到越来越多的关注。课程将探讨用深度神经网络处理点云的方法,摸清近几年的发展脉络,捋清发展方向。
-
03
3
课程设计了以具体项目为背景的大作业,在对前几章算法理解并掌握的基础上,加入自己的算法思维,完成点云目标检测任务,在公开数据集上进行测评,进一步强化项目能力。
课程大纲
-
第1章:Introduction and Basic Algorithms
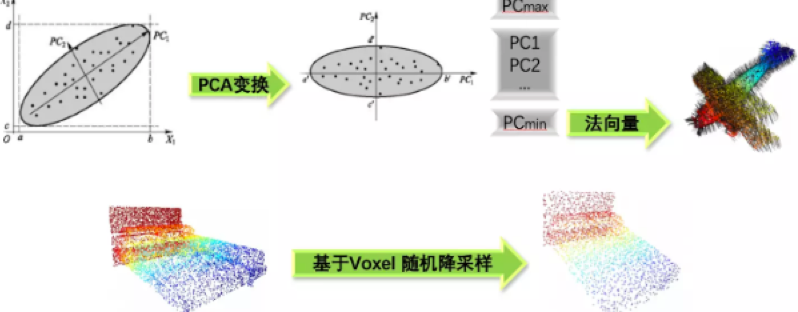
本节课作为点云处理课程的起始,简单介绍了点云数据的特性。从数据特性出发,讲解了PCA算法在点云处理中的算法原理和实际应用,还介绍了其他演变算法。
-
第2章:Nearest Neighbor Problem
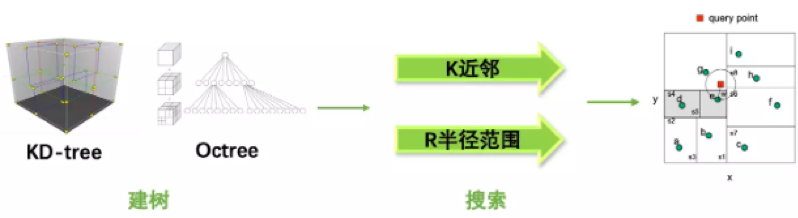
熟悉点云数据之后,进一步研究最近邻问题。从最基础的二叉树结构开始讲解,讲述了最近邻算法的基础框架,之后拓宽到KD-Tree和Octree结构,让学生全面了解最近邻算法的处理思路和实现细节。
-
第3章:Clustering
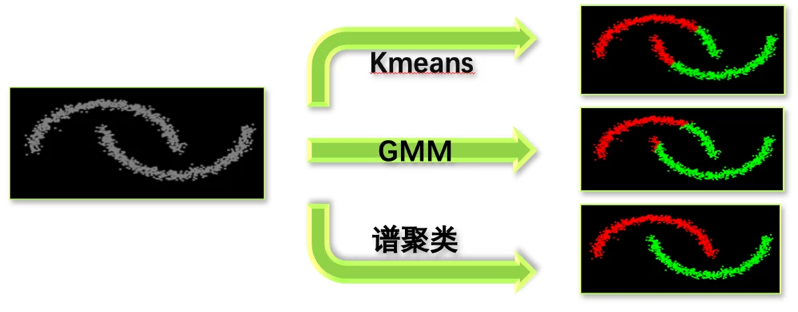
基于前一章的内容,系统讲解了各种经典点云聚类算法。从基础公式推导讲起,详细讲述了各种点云聚类算法的实现思路和详细流程。根据算法的理论内核,分类讲解算法内容,帮助学生理解算法间的区别与联系。
-
第4章:Model Fitting
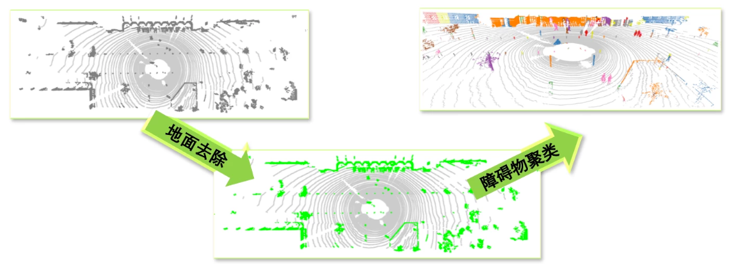
讲解了一些适用性更广泛的聚类算法,比如谱聚类、Mean Shift以及DBSCAN,之后由点云聚类思想引出模型拟合的概念,探讨了非常经典的霍夫变换以及RANSAC算法理念,将RANSAC理念应用在地平面分割上,让学生进行实际数据的操作和调试。
项目实践
-
实践一:主成分变换与降采样
使用Python语言,实现主成分变换和法向量估计,以及基于 Voxel的降采样方法。感受从0到1的创造乐趣。
-
实践二:KD-Tree/Octree建树与搜索
基于Python,手动实现KD-Tree/Octree建树与搜索,并进行耗时对比。理解最近邻搜索对于点云应用的重要性与实时搜索的难度。
-
实践三:Kmeans/GMM/谱聚类
此次,我们将从零实现Kmeans/GMM/谱聚类方法,并使用 Sklearn生成的聚类测试数据集进行测试,可视化聚类结果。对比不同聚类方法对不同数据的适用性。
-
实践四:地面拟合与聚类
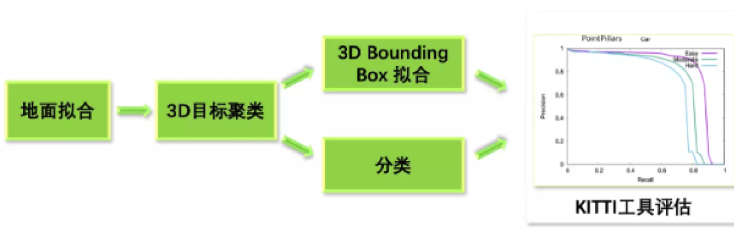
在本次实践中,将学会使用LSQ/Hough/RANSAC模型拟合方法,对KITTI 3D目标检测数据进行地面拟合,并将地面以外的障碍物点云进行聚类。地面去除与聚类是后续3D目标检测的重要前置步骤。
-
实践五:从零搭建PointNet
基于Pytorch从头实现PointNet网络。并利用PointNet++处理好的ModelNet40数据集,辅以相关数据增广预处理进行训练。本章实践有助于进一步理解端到端点云分类方法基本内涵。

-
实践六:目标检测
基于实践3、4、5,给出3D目标分类与Bounding Box,并使用KITTI目标检测精度评价工具对3D目标检测结果进行评估,报告Precision-Recall Curve。
-
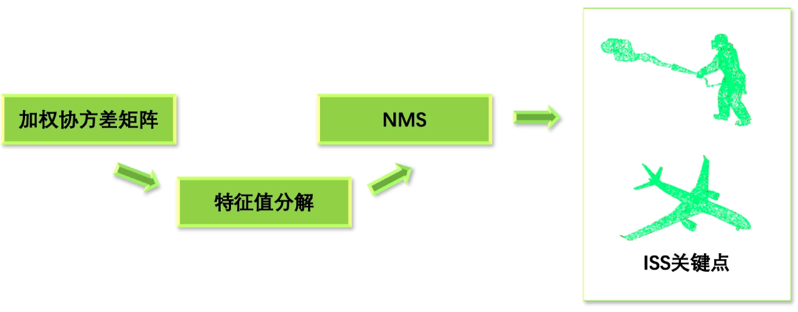
实践七:实现ISS关键点检测
动手实现Intrinsic Shape Signatures(ISS)算法,并使用 ModelNet40数据集进行测试。
-
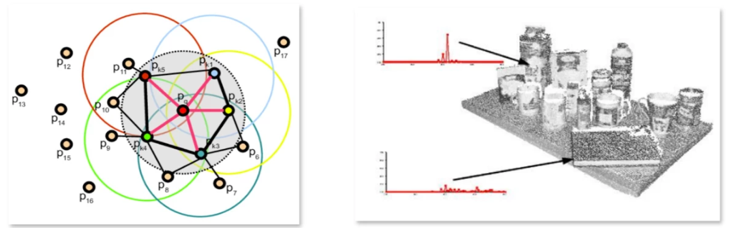
实践八:实现FPFH,SHOT特征描述子
使用PCL库或者自己实现实现FPFH,SHOT特征描述子。使用 ModelNet40数据集进行测试。关键点检测与特征描述子是基于特征点云匹配的基础。
-
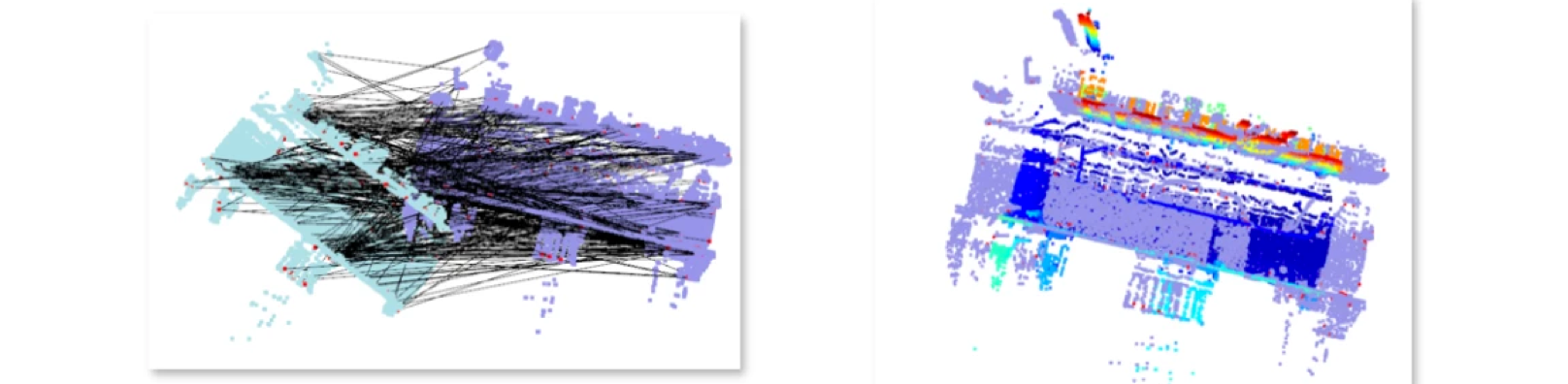
实践九:点云配准
在本节实践中,你可以从零实现一种基于特征的匹配方法(包括关键点检测和特征描述),也可以调用现有的API。此外,你还将需要从零实现ICP/NDT配准方法,以便理解点云配准的一般流程。
学习收获
- 1对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案。
- 2深入理解各个经典点云算法,比如Octree,GMM,Spectral Clustering,PointNet++ ICP,NDT等,并且在真实数据集上实现、应用这些算法。
- 3涉猎前沿的感知(Perception)方向的深度学习算法,比如物体检测、特征提取,点云配准等,了解学术界的热点问题及发展趋势。
- 4了解实际应用中各种算法的优势及局限,对于具体问题如何选择合适的算法,以及如何修改算法应对长尾/边缘问题(longtail/edgecases)。
- 课程适合谁学习
- 希望入门三维视觉、感知方向的同学
- 从事机器人、三维视觉领域工作的工程师,希望了解更多点云算法的实际应用
- 相关方向的科研人员,希望了解前沿研究的进展及方向
- 课程所需的基础知识
- Python编程基础
- 深度学习基础知识及PyTorch的基本用法,最好具备用于网络训练及推理的GPU
- 线性代数基础知识,了解基本的优化算法
全方位的学习服务
个性化增值服务,学习有保障更高效
-
 作业批改
作业批改
作业批改 助教1V1批改作业,定期针对作业中的“通病”进行点评
-
 结业证书
结业证书
结业证书 本课程将根据作业完成情况评选结业学员及优秀学员,颁发证书
-
 实时答疑
实时答疑
实时答疑 讲师助教微信群答疑,及时解决大家遇到的问题
-
 班班督学
班班督学
班班督学 班主任全程带班,不定时“关照”未交作业的同学,克服拖延
- 1:【开课仪式】
- 2-1:【视频】如何获得免费的GPU服务器资源
- 2-2:【文档】点云作业要求
-
第1章: Introduction and Basic Algorithms 5节课程2篇阅读材料·1次作业·2小时21分钟
本节课作为点云处理课程的起始,简单介绍了点云数据的特性。从数据特性出发,讲解了PCA算法在点云处理中的算法原理和实际应用,还介绍了其他演变算法。
-
第1节: Introduction of 3D Point Cloud
- 3-1:【课件】PointCloudLecture1
- 3-2:【视频】本章知识点的实际应用
-
第2节: Course outline and prerequisite
- 4:【视频】introduction
-
第3节: PCA and Kernel PCA
- 5-1:【视频】PCA
- 5-2:【视频】kernal PCA
-
第4节: Surface normal on surface
- 6:【视频】surface normal and filters
-
第5节: Project
- 7-1:【资料】说明文档
- 7-2:【数据集】Modelnet40
- 7-3:【作业】第一章
- 7-4:第一章作业思路提示
- 7-5:面试题汇总
-
第2章: Nearest Neighbor Problem 5节课程2篇阅读材料·1次作业·1小时52分钟
熟悉点云数据之后,进一步研究最近邻问题。从最基础的二叉树结构开始讲解,讲述了最近邻算法的基础框架,之后拓宽到KD-Tree和Octree结构,让学生全面了解最近邻算法的处理思路和实现细节。
-
第1节: Nearest Neighbor (NN) Problem
- 8-1:【课件】Lecture2
- 8-2:【视频】本章知识点的实际应用
-
第2节: Binary Search Tree(BST)
- 9:【视频】Binary Search Tree
-
第3节: KD-Tree
- 10:【视频】KD-tree
-
第4节: Octree
- 11:【视频】OCtree
-
第5节: homework:practice
- 12-1:面试题汇总
- 12-2:【作业】第二章
- 12-3:第二章作业思路提示
-
第3章: Clustering 7节课程2篇阅读材料·1次作业·2小时24分钟
基于前一章的内容,系统讲解了各种经典点云聚类算法。从基础公式推导讲起,详细讲述了各种点云聚类算法的实现思路和详细流程。根据算法的理论内核,分类讲解算法内容,帮助学生理解算法间的区别与联系。
-
第1节: Introduction Clustering
- 13-1:【课件】PointCloudLecture3Clustering
- 13-2:【视频】本章知识点的实际应用
-
第2节: Math prerequisite
- 14:【视频】math prerequisite
-
第3节: K-Means
- 15:【视频】K-means
-
第4节: Gaussian Mixture Model (GMM)
- 16:【视频】GMM
-
第5节: Expectation-Maximization (EM)
- 17:【视频】EM
-
第6节: Spectral Clustering
- 18:【视频】Spectral Clustering
-
第7节: homework:practice
- 19-1:面试题汇总
- 19-2:【作业】第三章
- 19-3:第三章作业思路提示
-
第4章: Model Fitting 8节课程2篇阅读材料·1次作业·2小时32分钟
讲解了一些适用性更广泛的聚类算法,比如谱聚类、Mean Shift以及DBSCAN,之后由点云聚类思想引出模型拟合的概念,探讨了非常经典的霍夫变换以及RANSAC算法理念,将RANSAC理念应用在地平面分割上,让学生进行实际数据的操作和调试。
-
第1节: 为什么讲解这些知识点
- 20:【视频】本章知识点的实际应用
-
第2节: Lecture Slides
- 21:【课件】三维点云第四章课件
-
第3节: Spectral Clustering
- 22:【视频】Spectral Clustering
-
第4节: meanshift & dbscan
- 23:【视频】meansh & dbscan
-
第5节: Robust Least Square
- 24:【视频】least_square
-
第6节: Hough Transform
- 25:【视频】hough_transform
-
第7节: RANSAC
- 26:【视频】ransac
-
第8节: homework:practice
- 27-1:面试题汇总
- 27-2:【作业】第四章
- 27-3:第四章作业思路提示
-
第5章: Deep Learning on Point Cloud 7节课程1篇阅读材料·1次作业·3小时32分钟
深度学习在点云上的应用越来越广泛,本节课以点云深度学习的发展脉络为导向,从Pointnet讲起,让学生深入了解深度学习在点云处理中的应用理念。
-
第1节: 为什么讲解这些知识点
- 28:【视频】本章知识点的实际应用
-
第2节: Lecture Slides
- 29:【课件】DeepLearningwithPointClouds.pdf
-
第3节: Introduction to Deep Learning
- 30:【视频】introduction to Deep learning
-
第4节: PointNet & PointNet++
- 31-1:【视频】PointNet
- 31-2:【视频】PointNet++
-
第5节: GCN
- 32-1:【课件】Lecture5-Supplementary.pdf
- 32-2:【视频】DGCNN
- 32-3:【视频】GCN
-
第6节: Supplementary
- 33:【视频】some comments on deep learning
-
第7节: homework:practice
- 34-1:【代码框架】framework
- 34-2:【作业】第五章
- 34-3:第五章作业思路提示
-
第6章: 3D Object Detection 7节课程2篇阅读材料·1次作业·2小时55分钟
基于前一节课的内容,讲解了三维目标检测的发展脉络和发展方向。探究了各种深度学习模型的特性和算法优势,深入浅出的剖析了各种方法的出发点和创新点。
-
第1节: 为什么讲解这些知识点
- 35:【视频】本章知识点的实际应用
-
第2节: Introduction
- 36-1:【课件】Point Cloud Lecture 6
- 36-2:【视频】introduction
-
第3节: Image based object detection - RCNN, FastRCNN, FasterRCNN, SSD
- 37:【视频】Image based object detection
-
第4节: VoxelNet, PointPillars
- 38:【视频】Voxelnet&Pointpillar
-
第5节: PointRCNN
- 39:【视频】PointRCNN
-
第6节: Image and Point Cloud fusion - Frustum PointNet, PointPainting
- 40:【视频】fusion
-
第7节: homework:practice
- 41-1:面试题汇总
- 41-2:【作业】第六章
- 41-3:第六章作业思路提示
-
第7章: 3D Feature Detection 7节课程1篇阅读材料·1次作业·2小时8分钟
点云处理算法一定绕不开特征点提取部分,本节课以图像特征提取为出发点,讲解点云特征点检测方法,并分析了相关案例,增强算法理解。
-
第1节: 为什么讲解这些知识点
- 42:【视频】L7&8 为什么要讲本章节知识点
-
第2节: Introduction & harris 2d
- 43-1:【课件】Point Cloud Lecture7
- 43-2:【视频】introduction & harris 2d
-
第3节: harris 3d & 6d
- 44:【视频】harris 3d & 6d
-
第4节: Intrinsic Shape Signatures (ISS)
- 45:【视频】ISS
-
第5节: Deep learning 3D features - USIP
- 46:【视频】USIP
-
第6节: SO-Net
- 47:【视频】SO-Net
-
第7节: homework:practice
- 48-1:【作业】第七章
- 48-2:第七章作业思路提示
-
第8章: 3D Feature Description 5节课程1篇阅读材料·1次作业·2小时27分钟
从特征检测方法拓展到特征描述子的计算方法,从传统算法的思想内核,到深度学习方法的实现效果,让学生理解特征描述的思想和思路,方便学生进一步学习配准算法。
-
第1节: PFH & FPFH
- 49-1:【课件】Point Cloud Lecture 8
- 49-2:【视频】Classical method-PFH & FPFH
-
第2节: SHOT
- 50:【视频】Classical method-SHOT
-
第3节: 3DMatch & Perfect Match
- 51:【视频】3DMatch & Perfect Match
-
第4节: PPFNet & PPF-FoldNet
- 52:【视频】PPFNet & PPF-FoldNet
-
第5节: homework:practice
- 53-1:【作业】第八章
- 53-2:第八章作业思路提示
-
第9章: Registration 6节课程2篇阅读材料·1次作业·2小时21分钟
融合前几节课的精华,引出点云配准算法。将算法框架模块化,易于学生理解掌握,从零实现一种基于特征的匹配方法,掌握点云配准的一般流程。
-
第1节: 为什么讲解这些知识点
- 54:【视频】本章知识点的实际应用
-
第2节: Lecture Slides
- 55-1:【课件】Point Cloud Lecture9
- 55-2:【视频】ICP part I
-
第3节: Iterative Closest Point (ICP)
- 56:【视频】ICP part 2
-
第4节: Normal Distribution Transform (NDT)
- 57:【视频】NDT
-
第5节: Registration by RANSAC with feature detection, description, matching
- 58:【视频】RANSAC Registration
-
第6节: homework:practice
- 59-1:面试题汇总
- 59-2:【作业】第九章
- 59-3:第九章作业思路提示
- 第10章: Project 1节课程1篇阅读材料·1次作业
-
第1节: Final Project
- 60-1:【作业】Final Project
- 60-2:大作业思路提示

课程讨论区
已累计讨论26495个问题
课程配备专属讨论区,不仅有讲师、助教全程答疑,更能与同学们交流讨论,在思维碰撞中加深理解
在课程中随想随问,同学们的问题也可能启发到你
在课程讨论区,和684位同学一起探讨更多问题···
作业批改
已累计批改4951份作业
助教一对一批改作业,定期针对作业中的问题进行评讲
结业证书
课程根据作业完成情况评选结业学员及优秀学员,颁发证书
优秀学员更能获得额外购课优惠

班班督学
班班、助教、讲师全程带班,日常答疑解惑

FAQ
1、课程可以试听吗?
可以,您可以联系客服领取试听内容,根据试听的效果决定是否报名。
2、报名课程后,如果不满意,可以退款吗?
我们承诺: 报名后7天内且学习进度停留在第一章节的内容可以无条件全额退款,若您的学习进度超过第一章或报名时间超过7天将不再支持退款哦。课好不好,学了就知道了!
3、报名课程的费用可以开发票吗?
深蓝学院所有课程都可以开具发票。您可以登录深蓝学院官网(https://www.shenlanxueyuan.com),进入个人“账户中心”,在线申请。
4、报名后怎么开始学习呢?
PC端:登录深蓝学院官网(https://www.shenlanxueyuan.com),进入“个人中心”或“我的课程” 的课程即可开始学习。课程中包含讲师讲解的视频、课件、代码、作业及其它学习资料。建议在PC端学习体验更好。
如果想缓存视频,可下载深蓝学院APP。
5、可以跟讲师直接交流吗?
报名课程后添加课程对应的班主任微信,由其邀请加入微信答疑群。在答疑群内,您可以直接跟讲师和其他同学讨论交流。
报名后在对应的课程详情页,可查看对应的班主任微信。
6、学习形式和学习周期是怎样的?
为保证学习质量方便同学们反复观看,本课程采用录播形式。建议同学们登录深蓝学院PC端官网体验更佳。
7、课程有有效期吗?
为了督促同学们学习,保证学习效率,学院的课程有效期均为一年,当课程有效期截止后将不再支持观看视频、下载课件等课程服务及操作。若同学们依旧想观看视频和下载课件,建议可选择续费本课程。需要提醒大家的是,课程答疑、作业批改&讲评等课程相关服务期从报名加入课程后开始计算至少保证三个月。
8、作业会提供参考答案吗?
不提供参考答案。当每章作业截止提交后,会解锁作业思路讲解。我们希望引导大家培养独立思考的习惯和敢于动手实践的勇气,以便尽快适应实际工作中解决问题的模式。做作业过程中,如果有任何困惑和问题,可以在课程讨论区和交流群内提问解决。
其他问题请咨询客服

添加客服,了解课程信息!
课程预览
三维点云处理
















