分享至
主讲人:胡寒江 | 卡内基梅隆大学博士
2022.10.18 21:00
61分钟
5252人次学习
立即学习
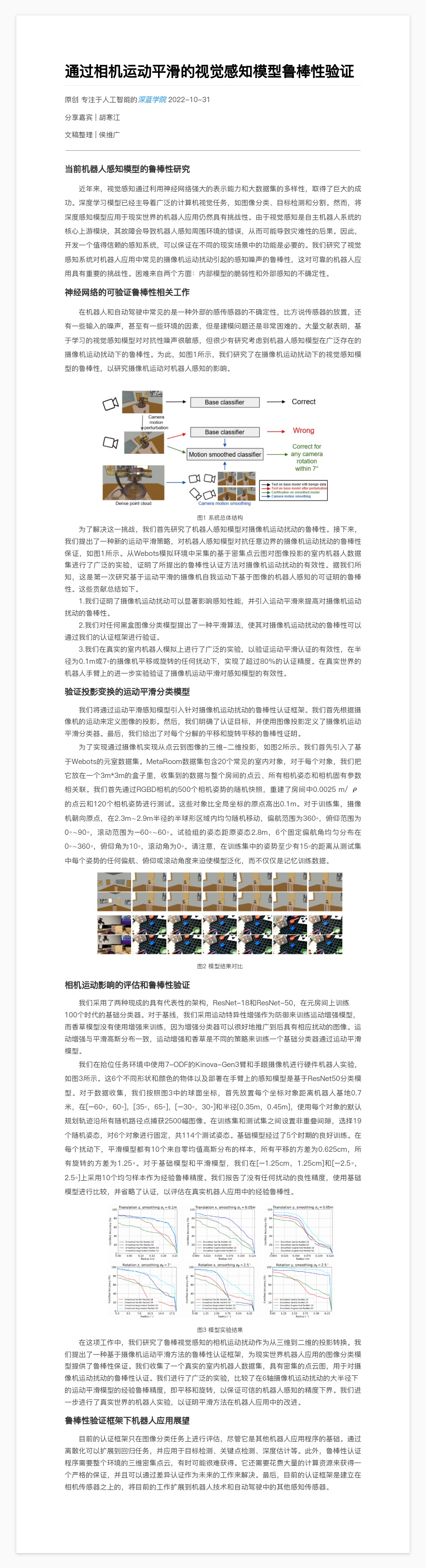
随着深度学习在机器人中广泛应用,计算机视觉模型的鲁棒性越来越受到关注。大量研究表明深度学习模型对对抗性噪声敏感,但很少有工作考虑机器人感知模型在广泛存在的相机运动扰动下的鲁棒性。本次讲座将介绍机器人中相机运动扰动下视觉感知模型的鲁棒性研究,具体来说,我们首次提出了一种用于图像分类模型的相机运动平滑方法,使得其在相机运动扰动下的鲁棒性可以得到证明。由于该鲁棒性验证框架为黑盒感知网络提供了严格且可扩展的鲁棒性保证,因此它们适用于广泛的机器人下游视觉应用任务,增加人工智能在机器人应用中的可信度。我们建立了带有房间稠密点云的室内机器人数据集 MetaRoom对该可验证鲁棒感知任务进行了广泛的实验,我们还通过机械臂末端相机进行实物硬件实验来验证我们的方法在真实机器人上的有效性。相关代码将会在https://github.com/HanjiangHu/camera-motion-smoothing上开源。
报名成功
扫码备注【感知模型】领取PPT
点此立即学习
添加微信领取课件
一定记得备注【感知模型】

















 报名成功
报名成功