课程中心
公开课
面试题库
企业服务
企业内训
企业招聘
高校合作
课程中心
公开课
面试题库
企业服务
企业内训
企业招聘
高校合作
登录/注册
登录/注册
登录/注册
登录 /注册
课程中心
公开课
面试题库
企业服务
企业内训
企业招聘
高校合作
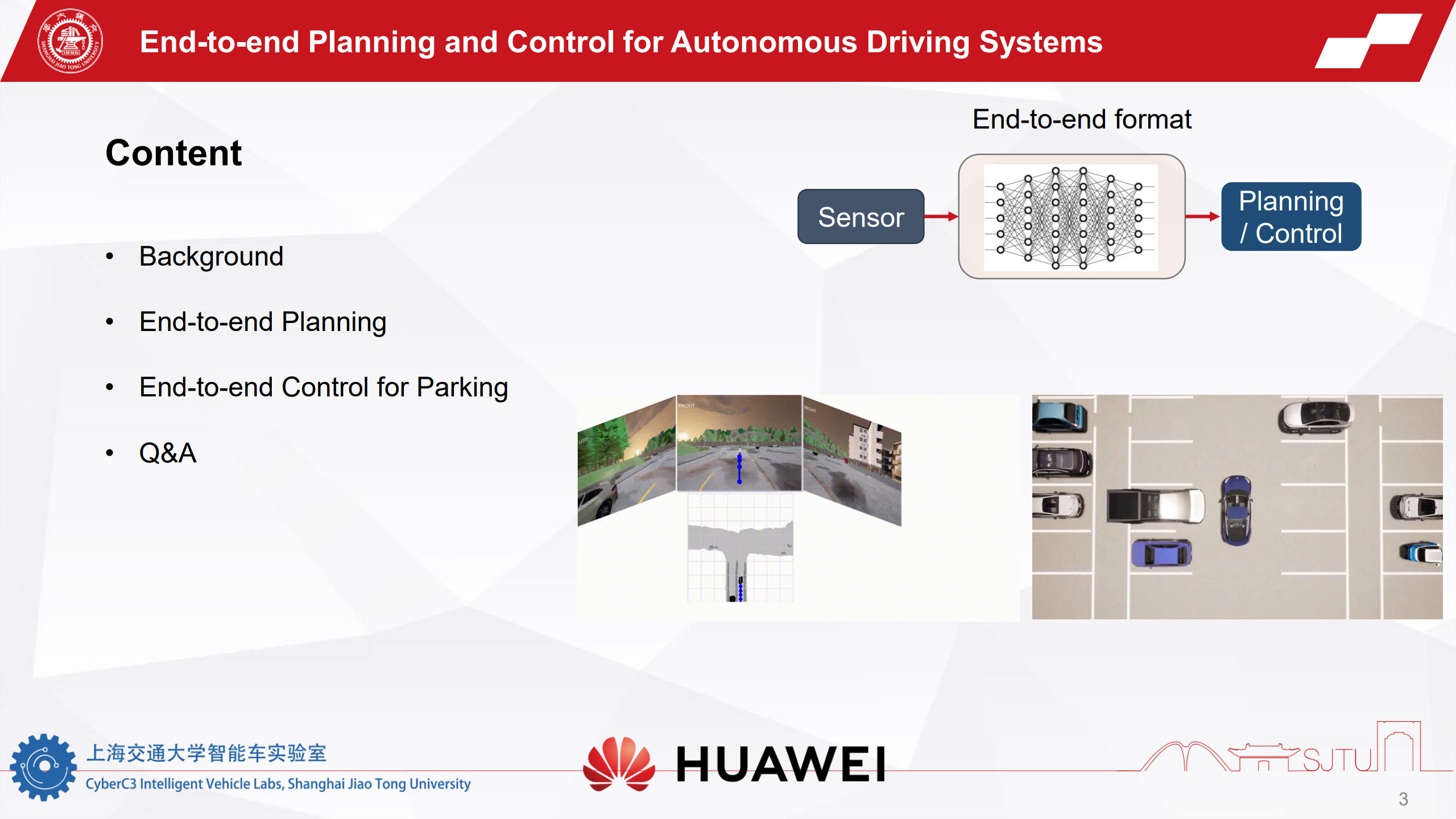
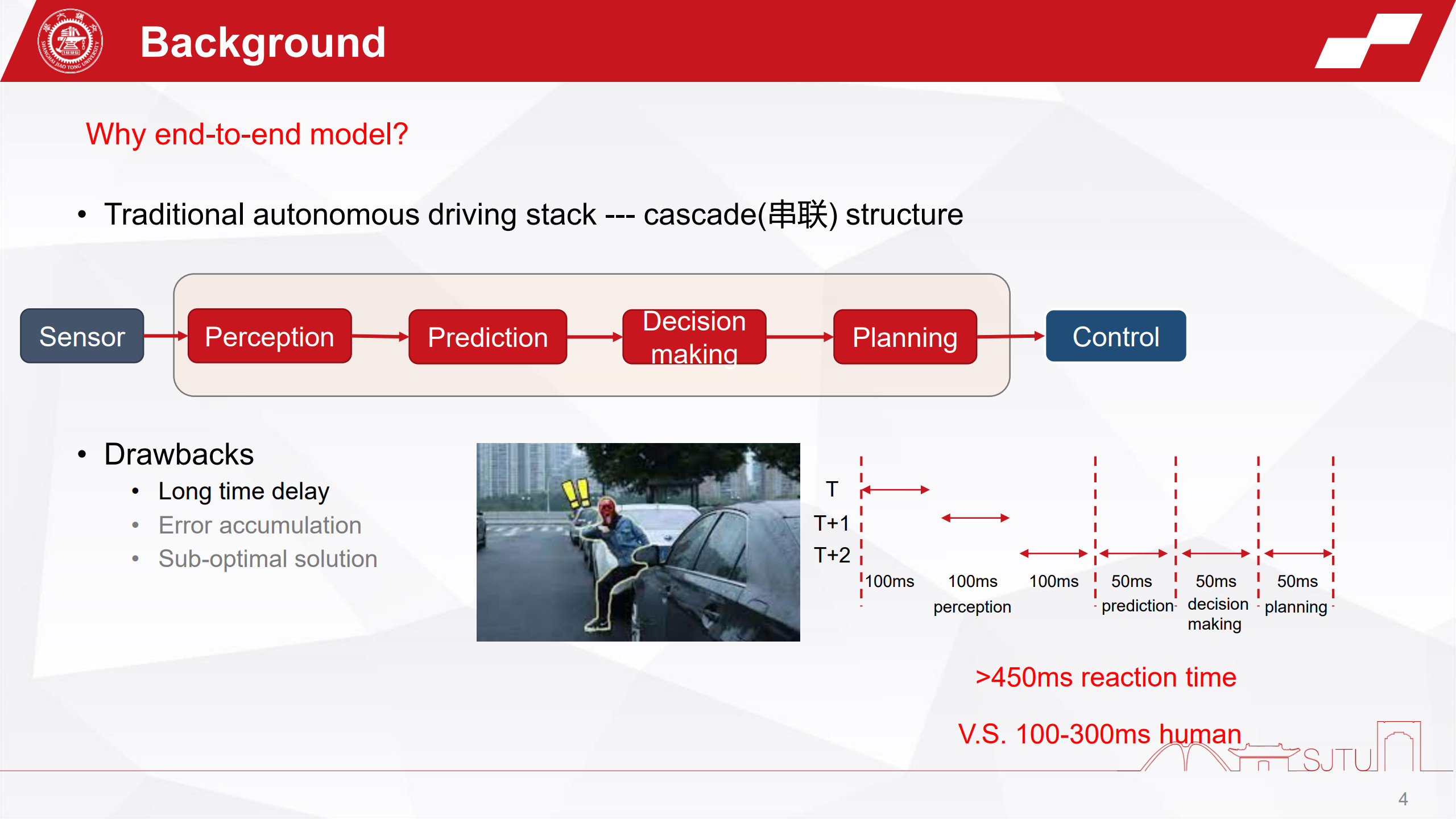
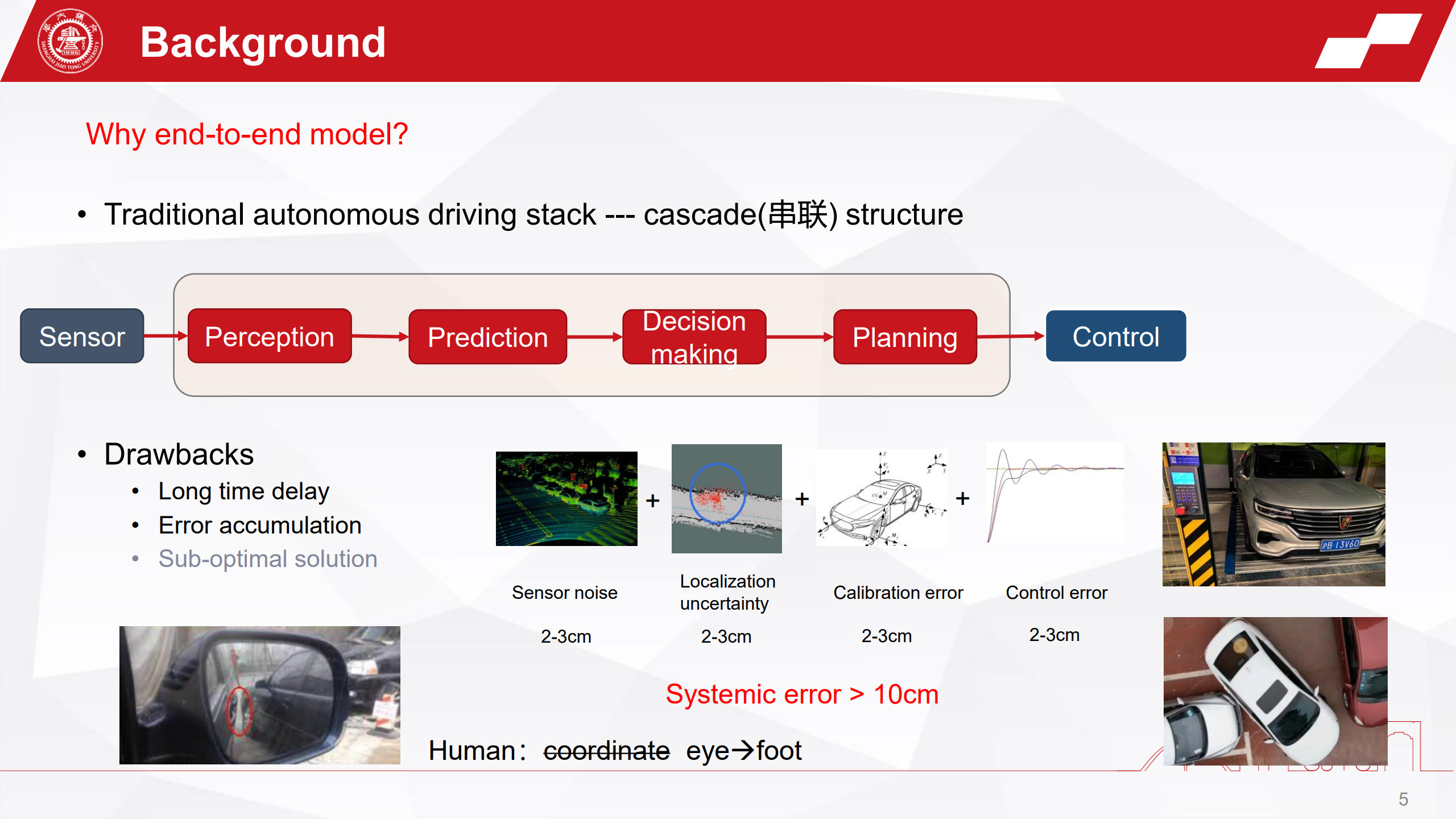
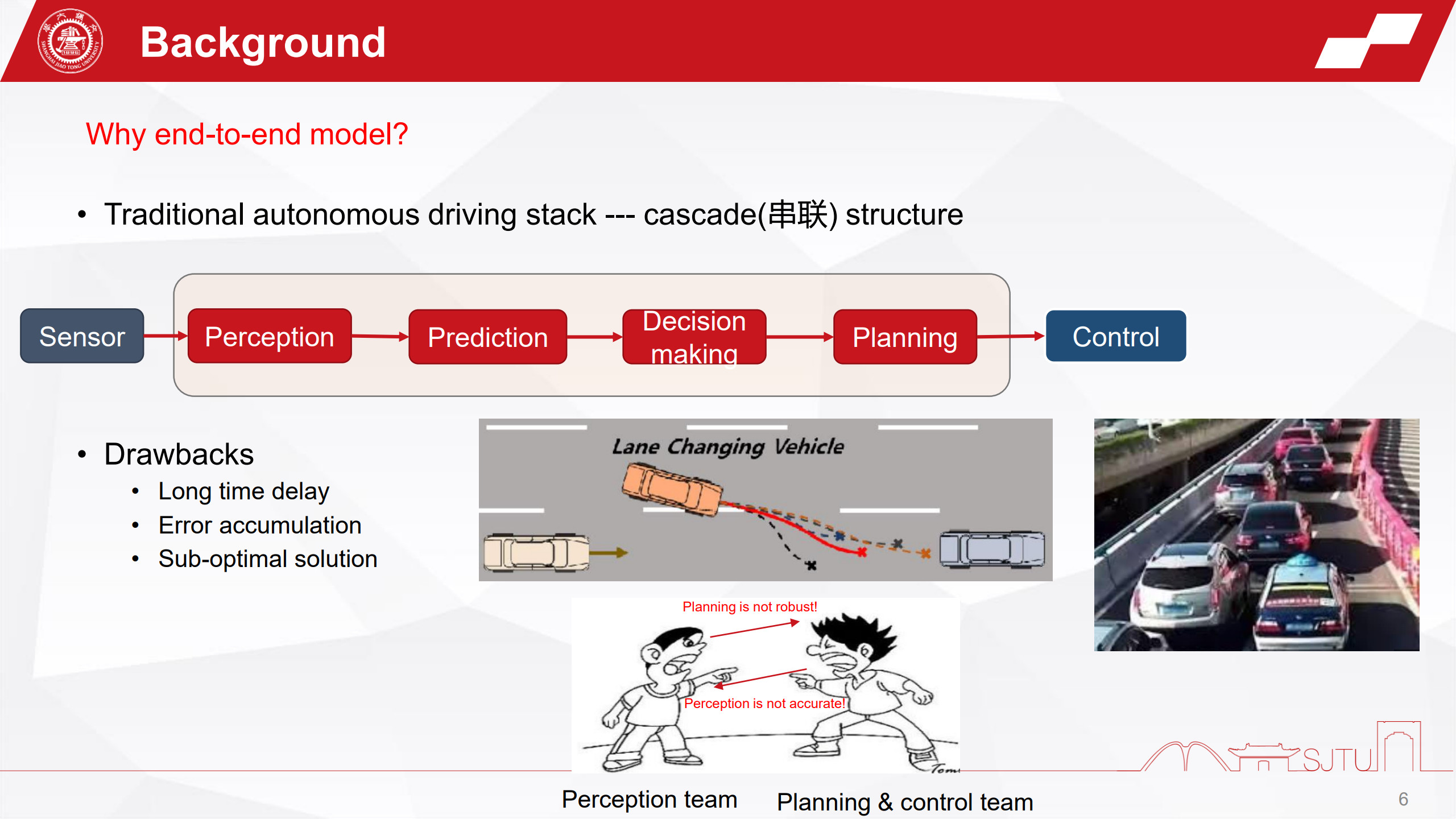
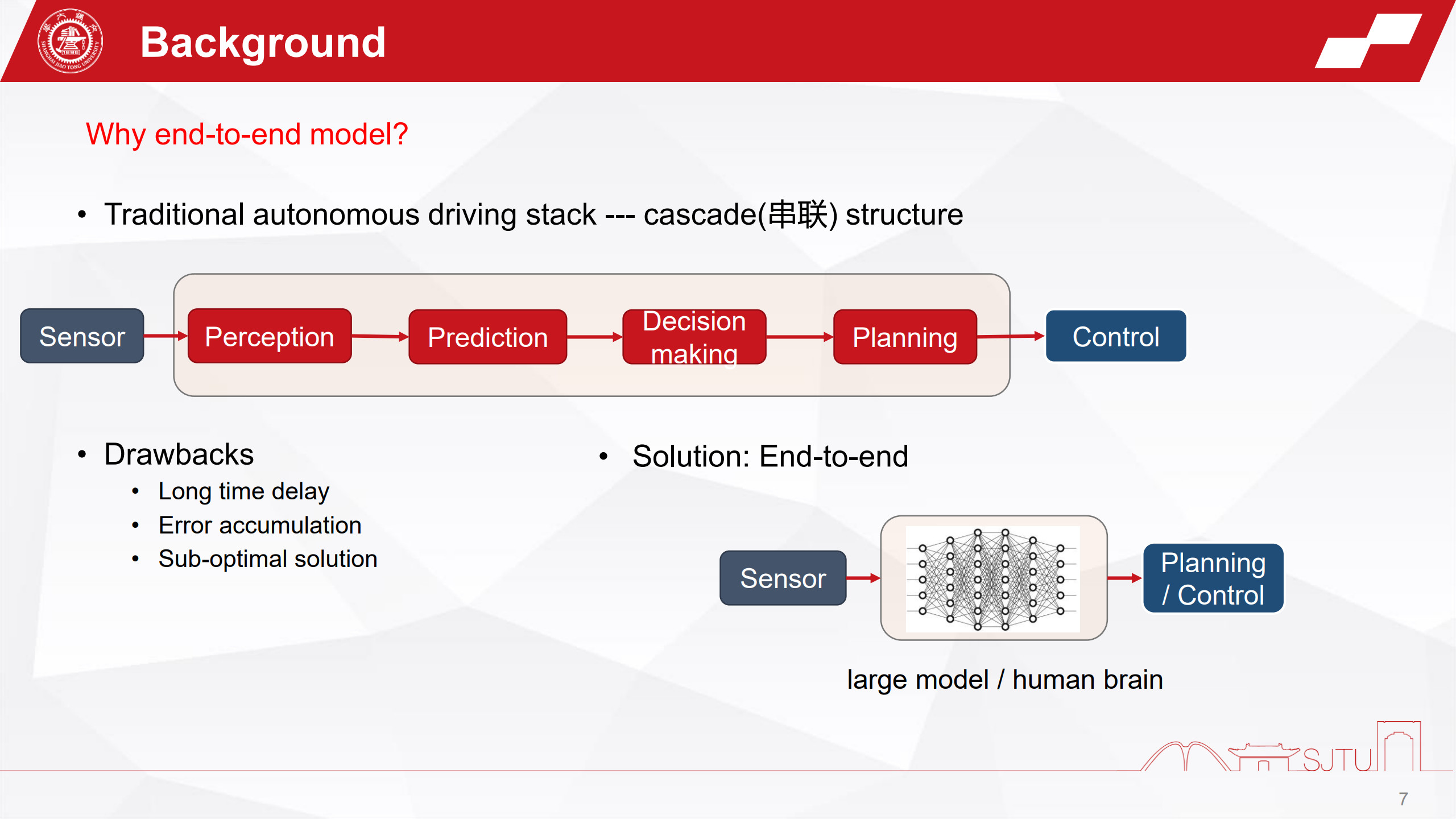
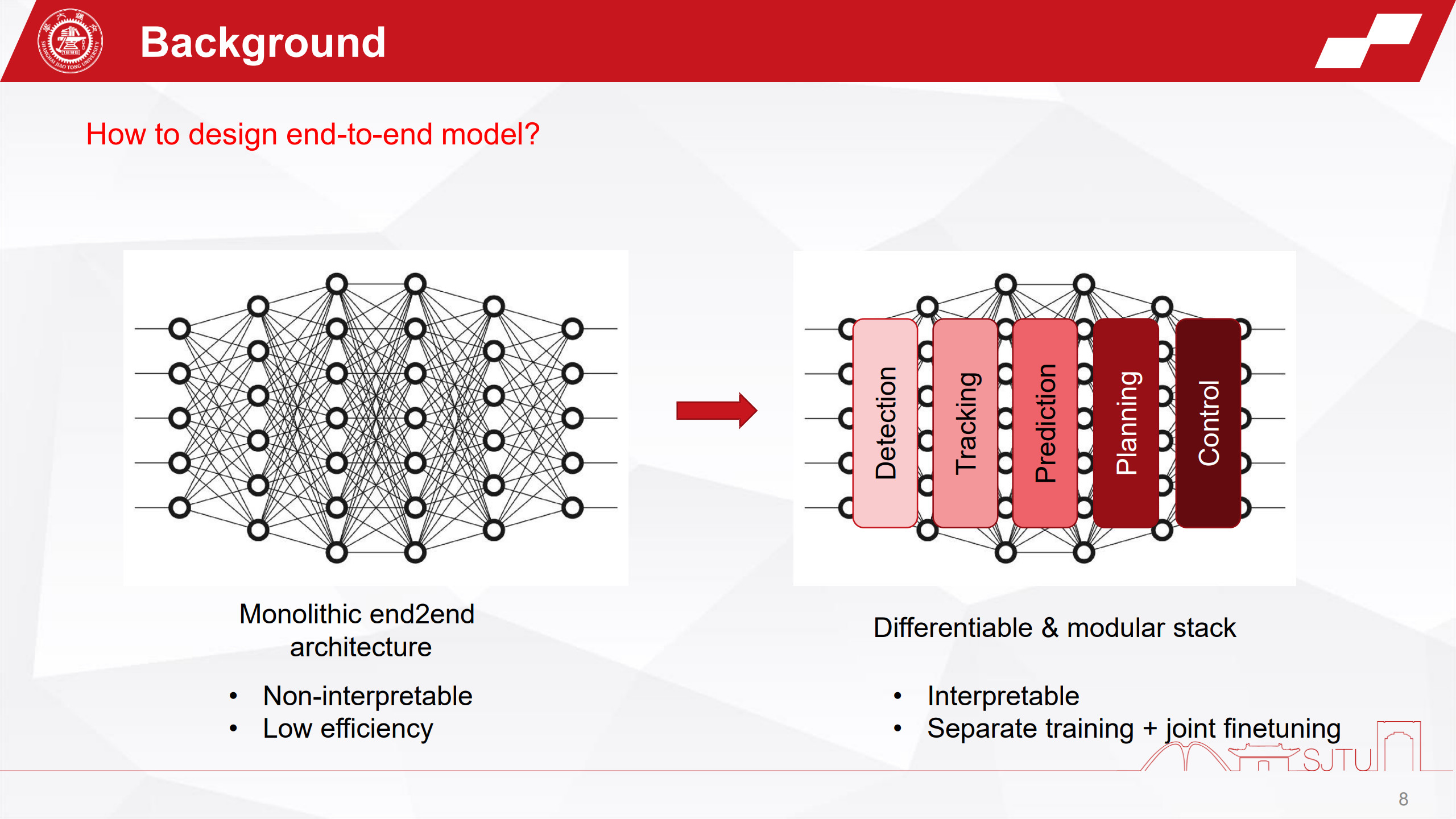
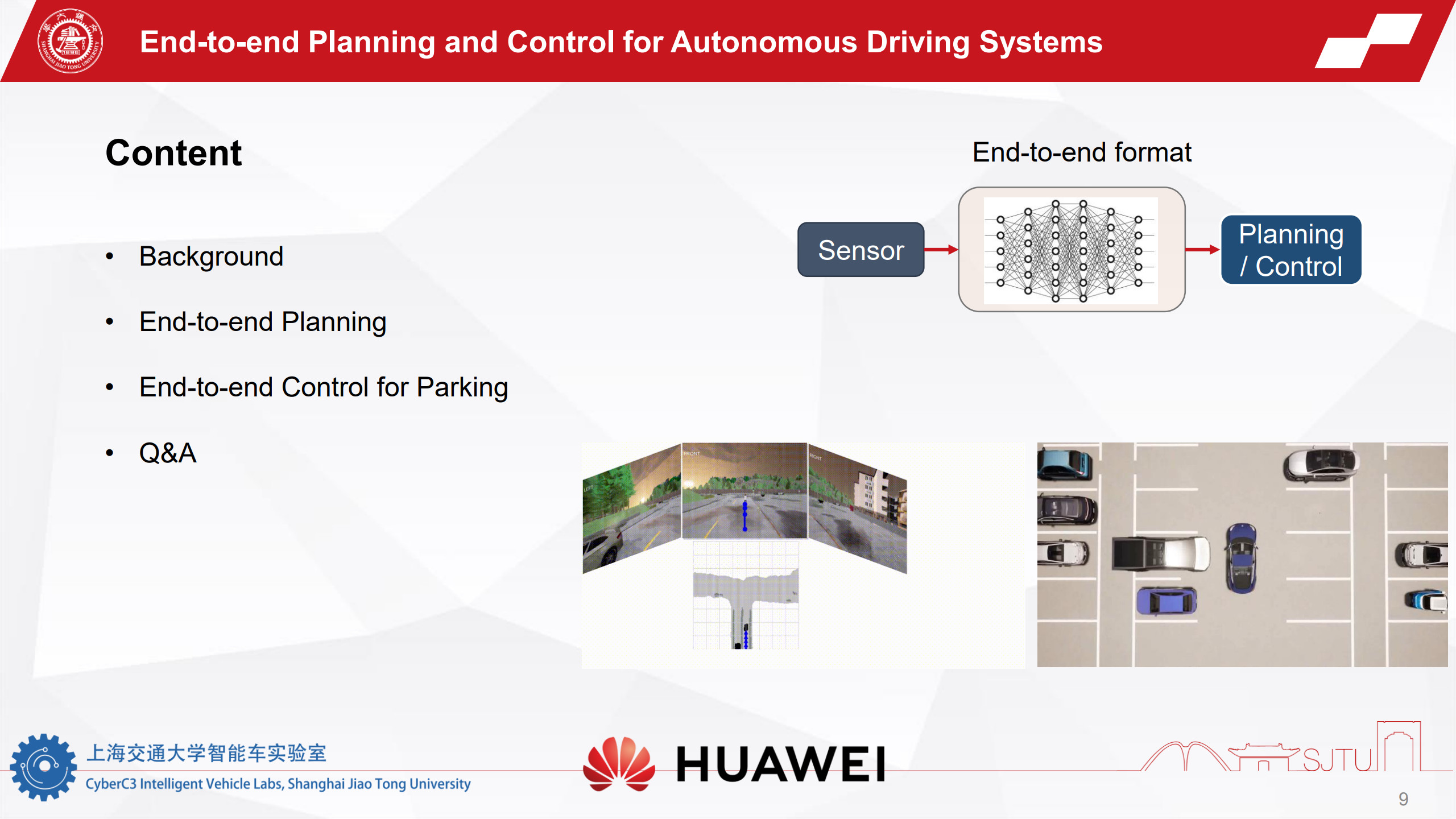
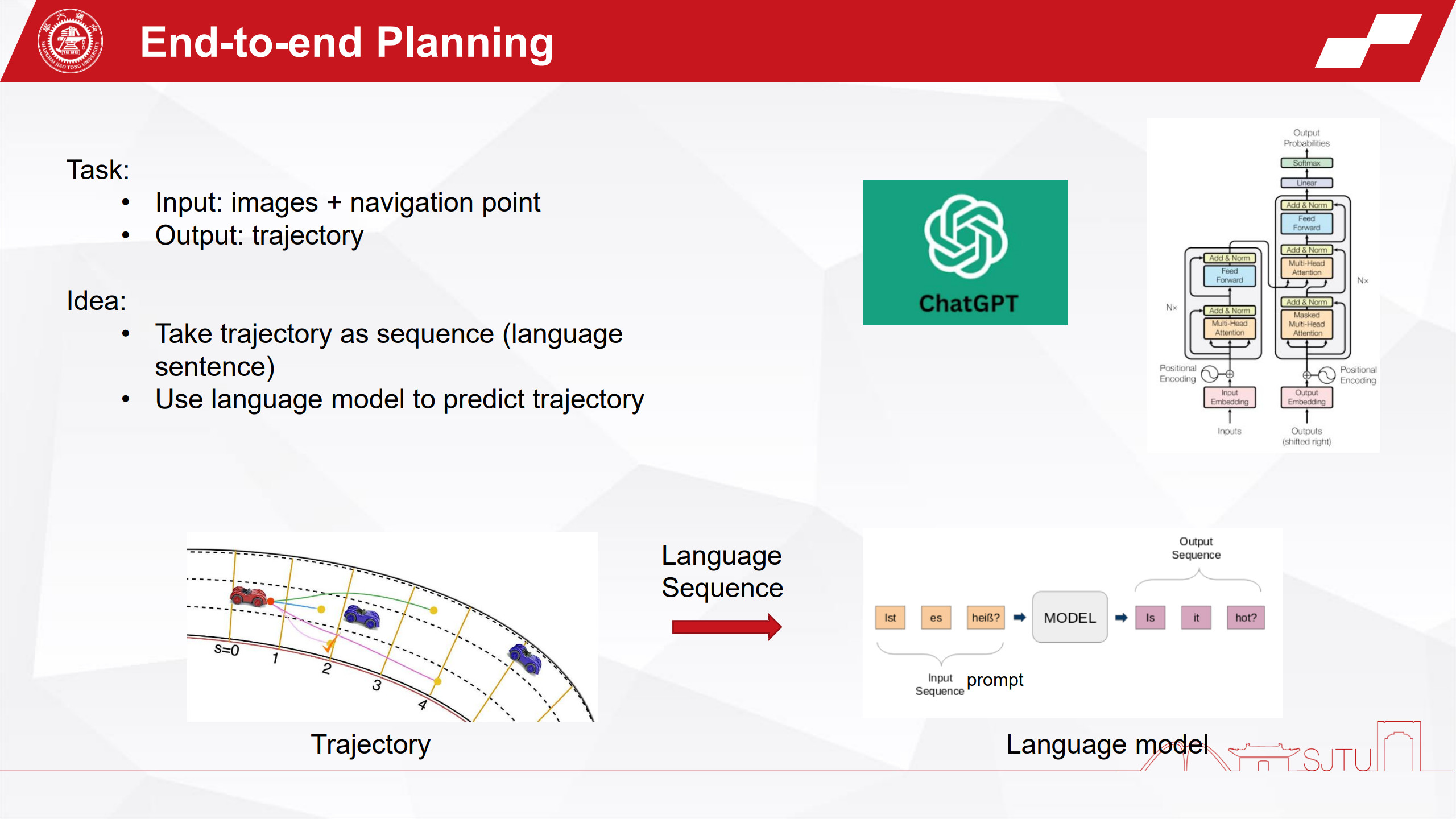
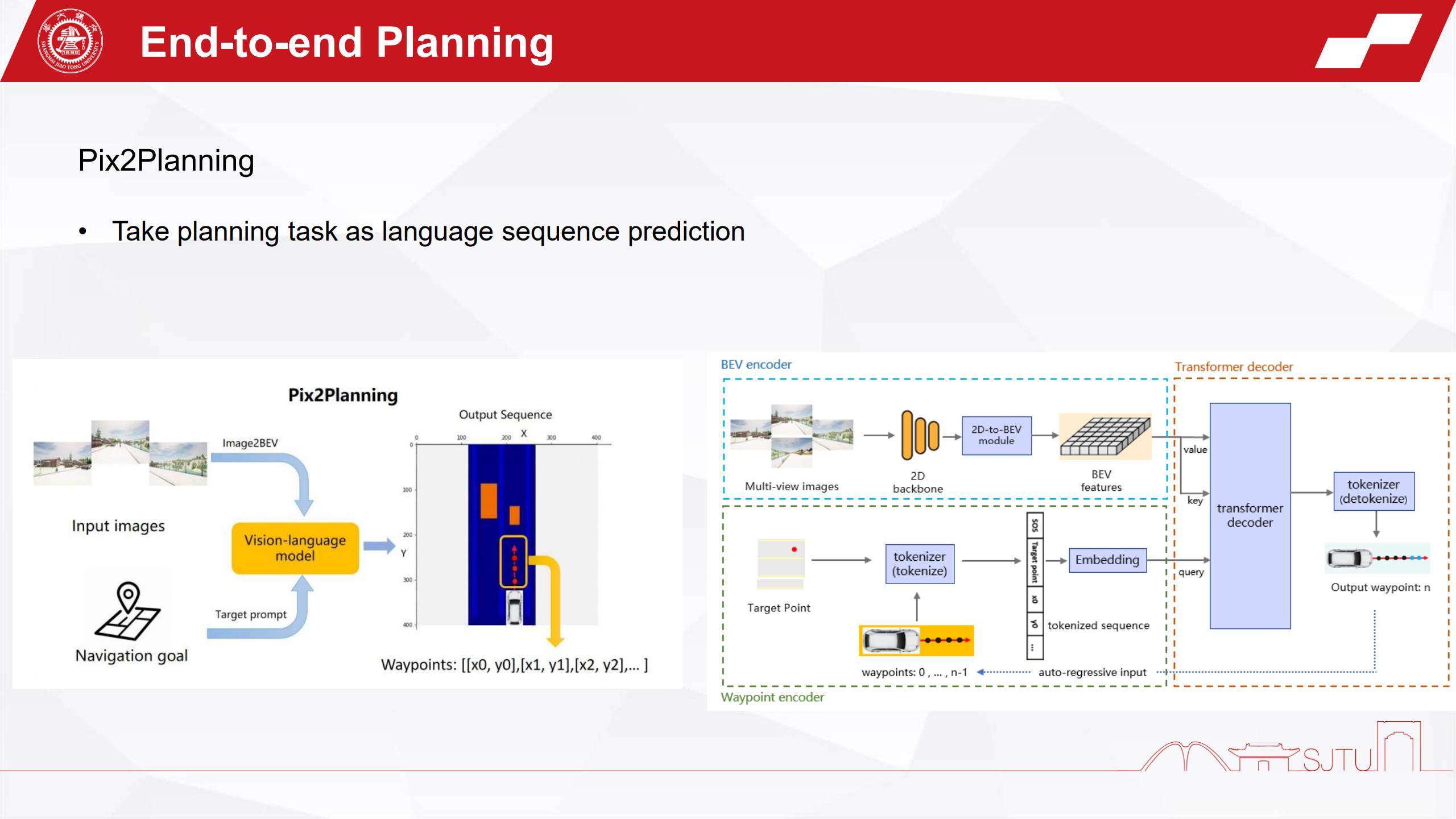
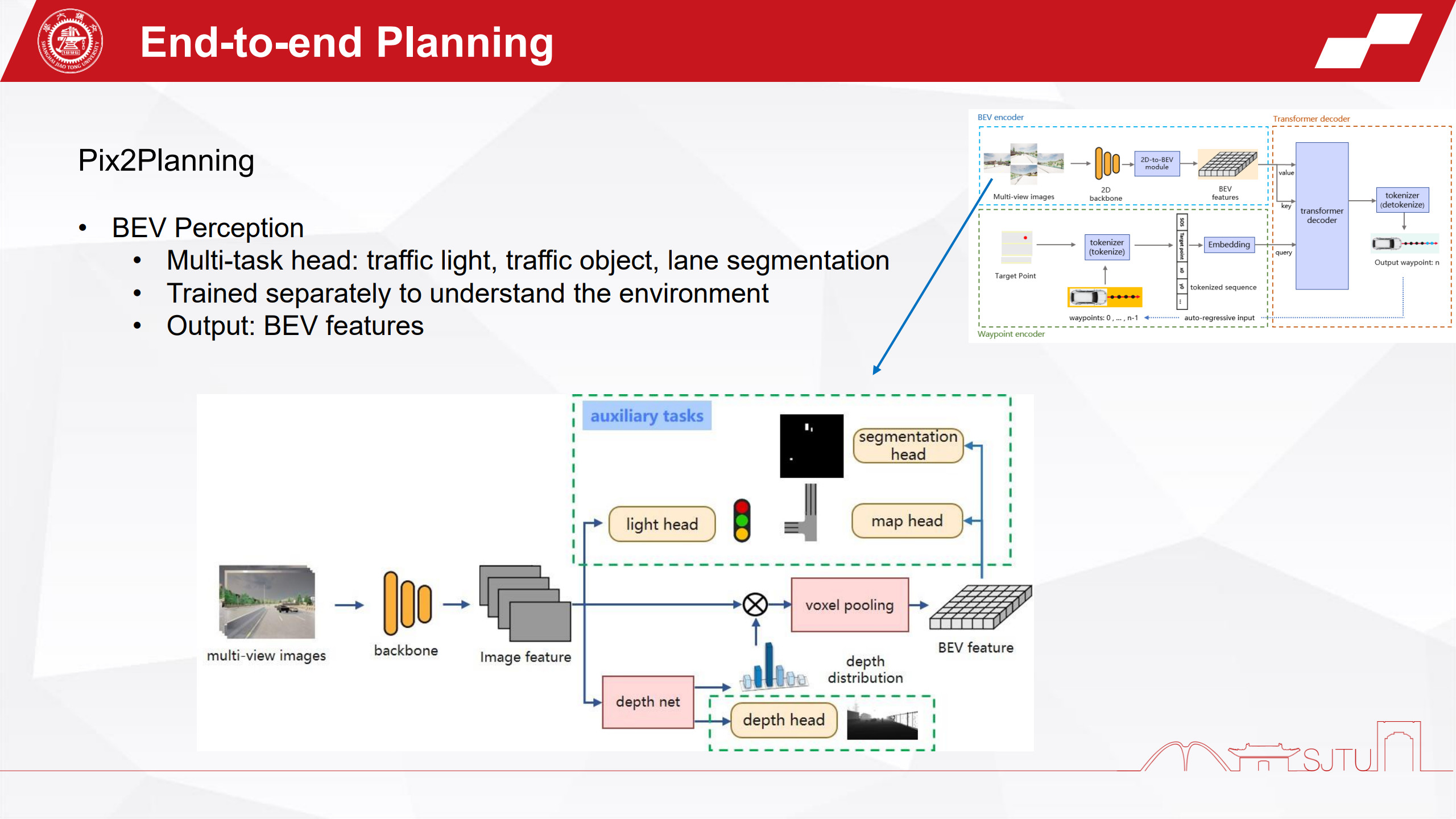
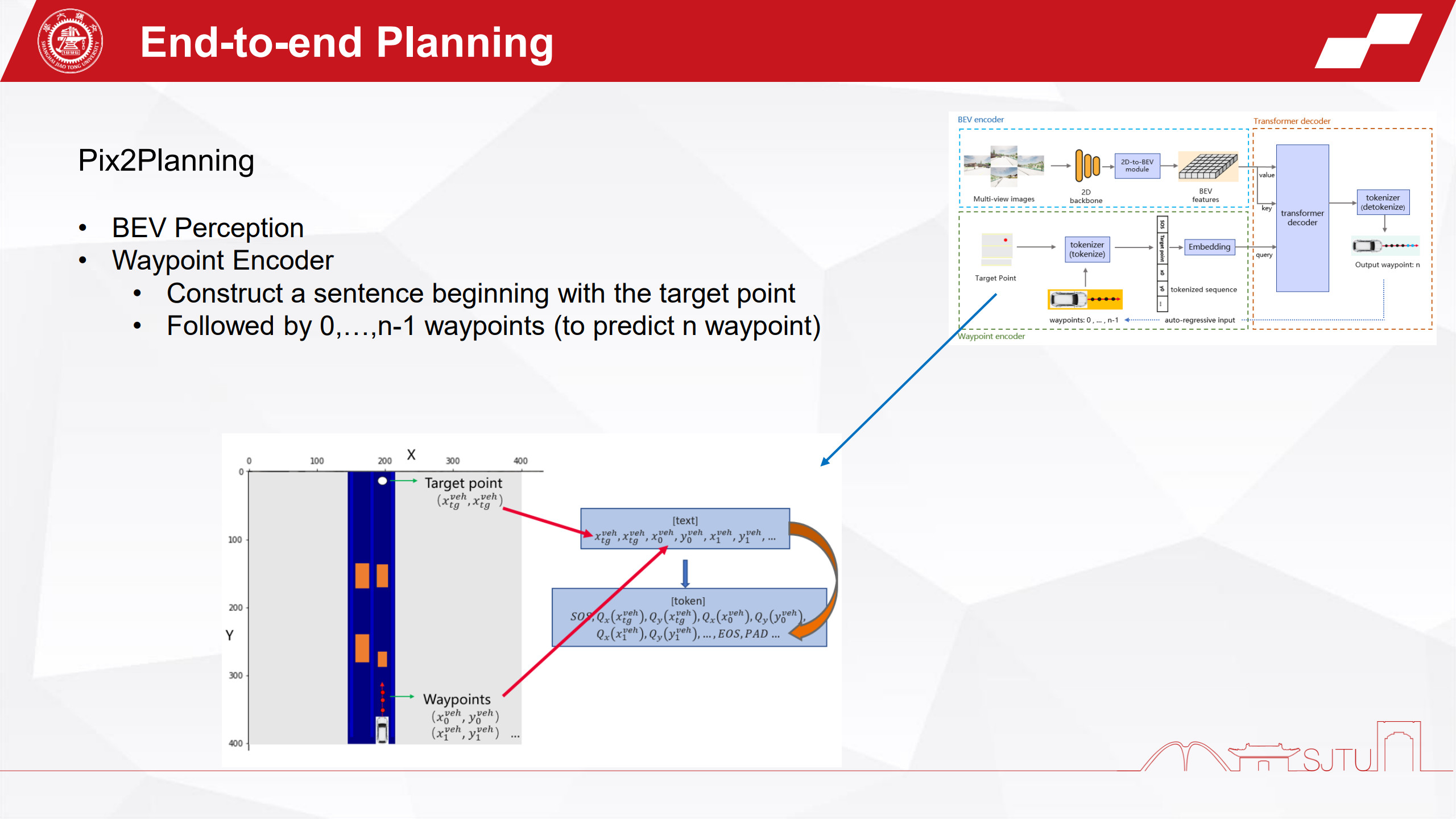
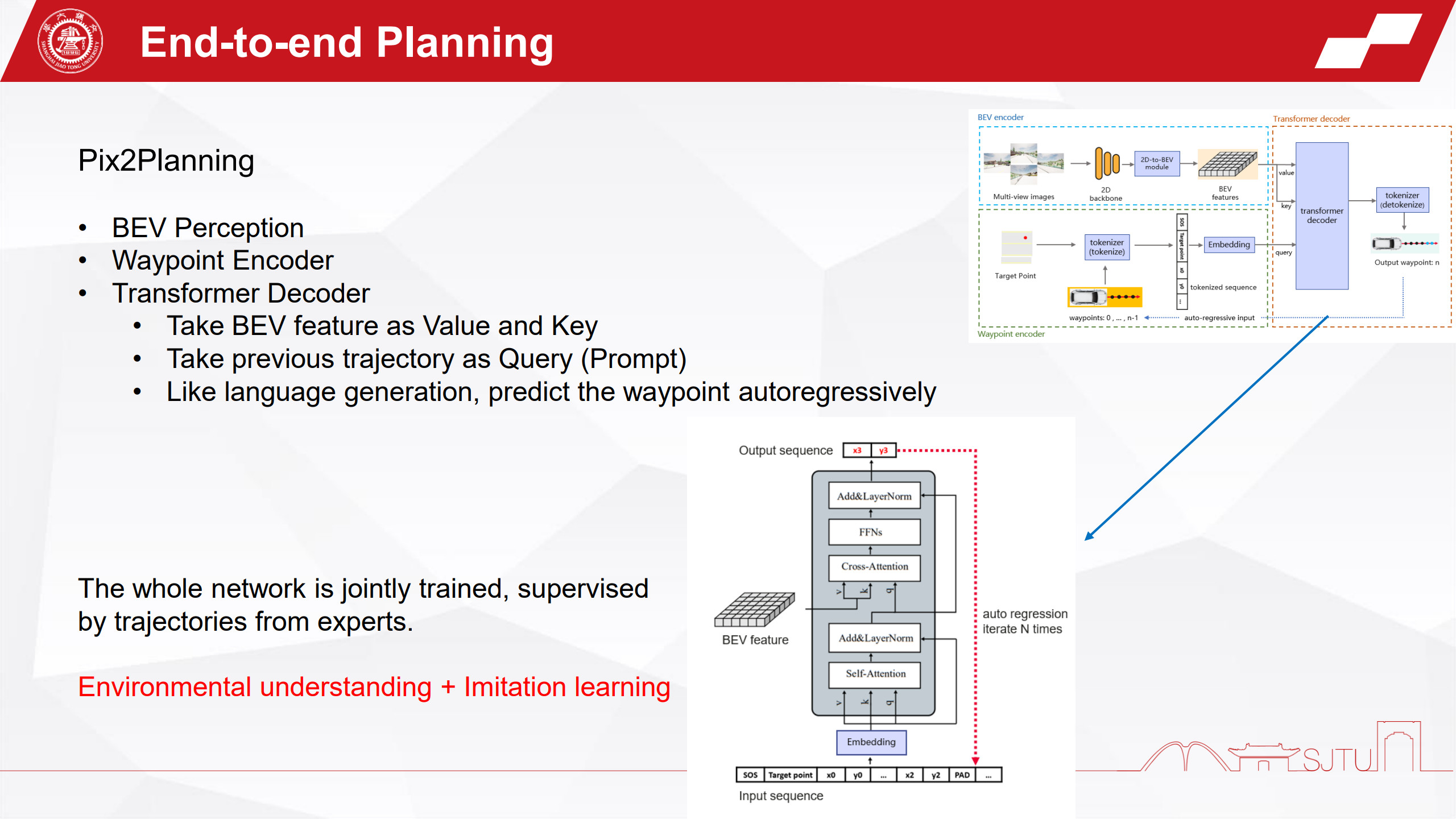
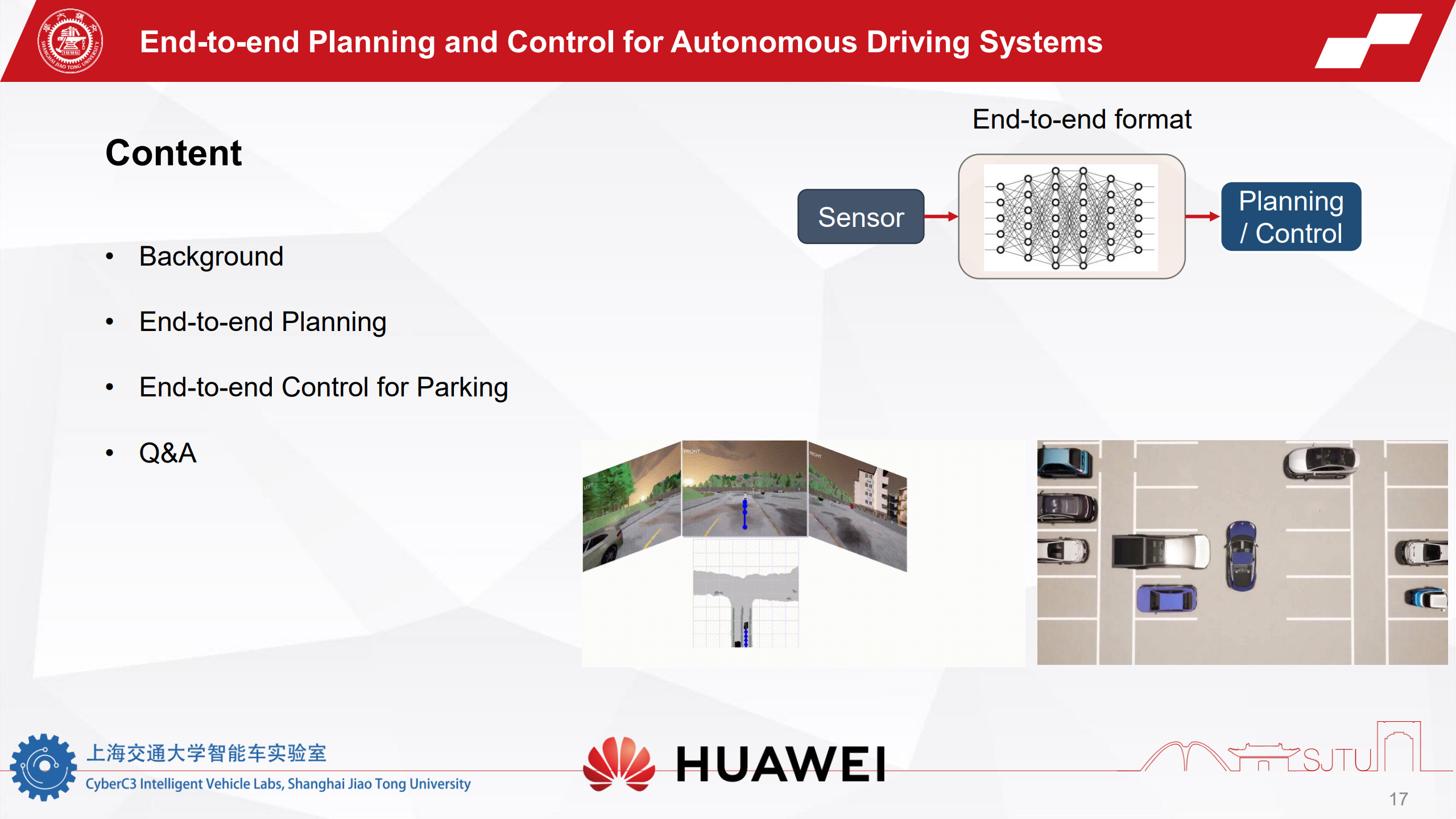
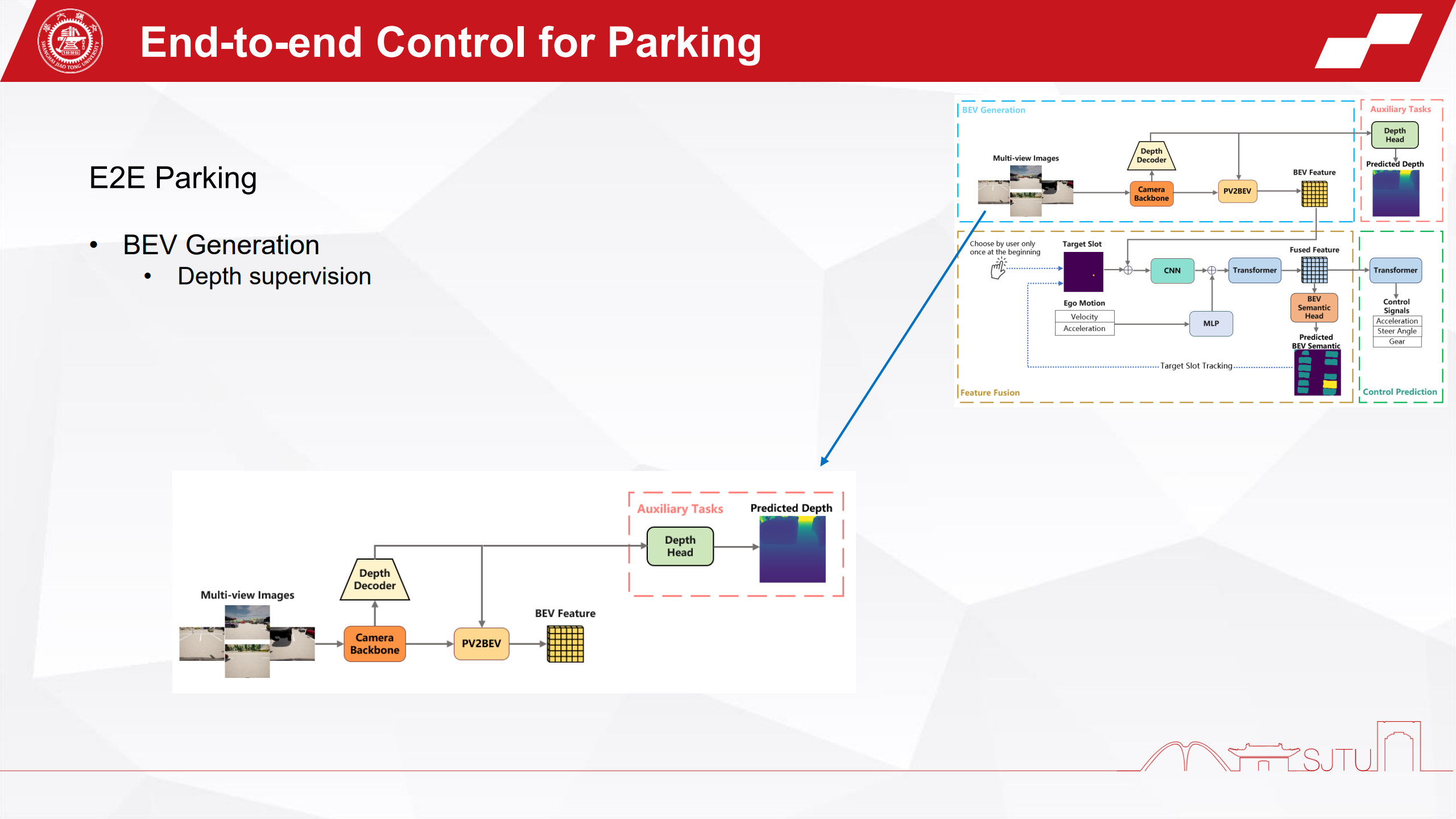
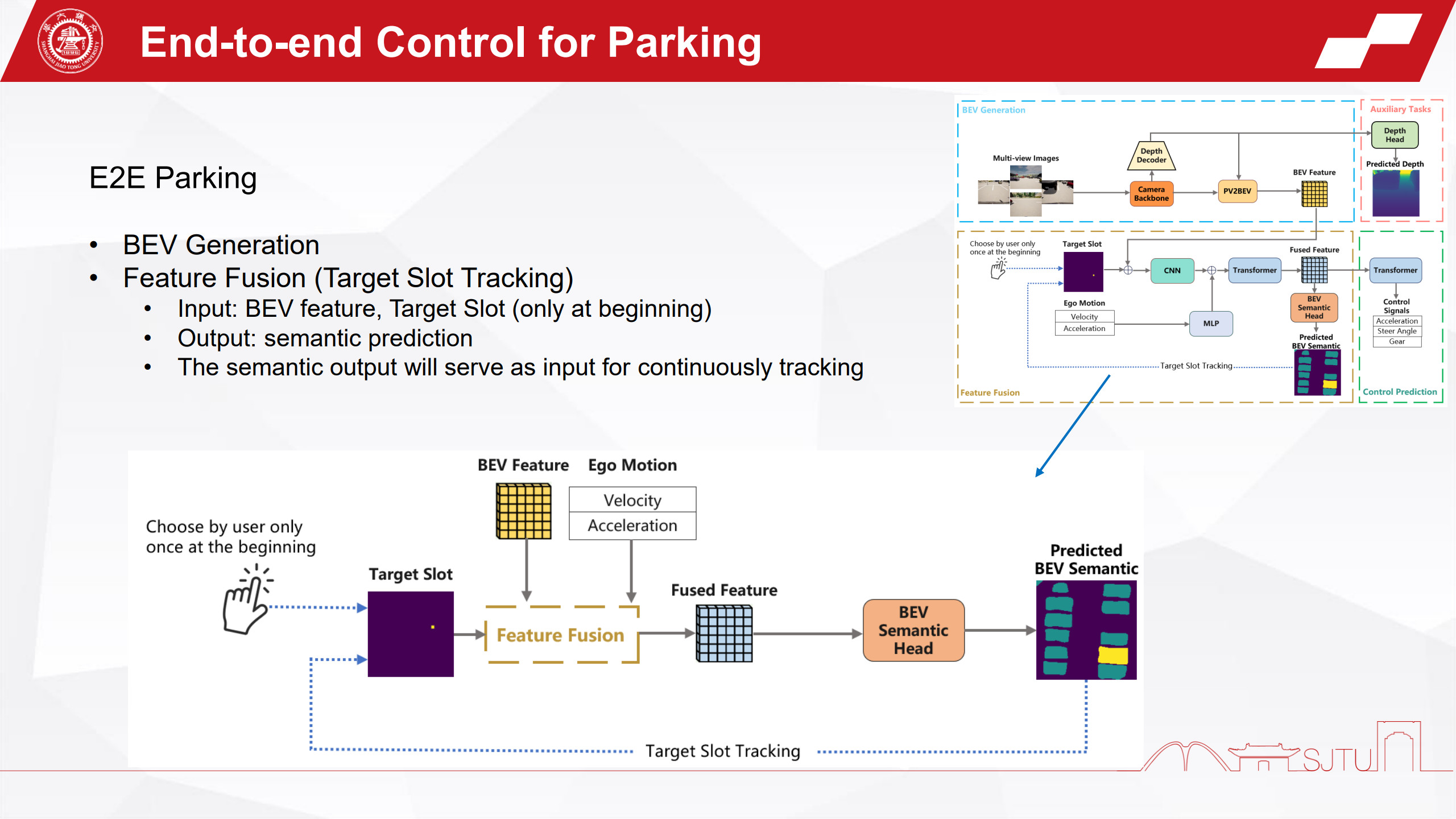
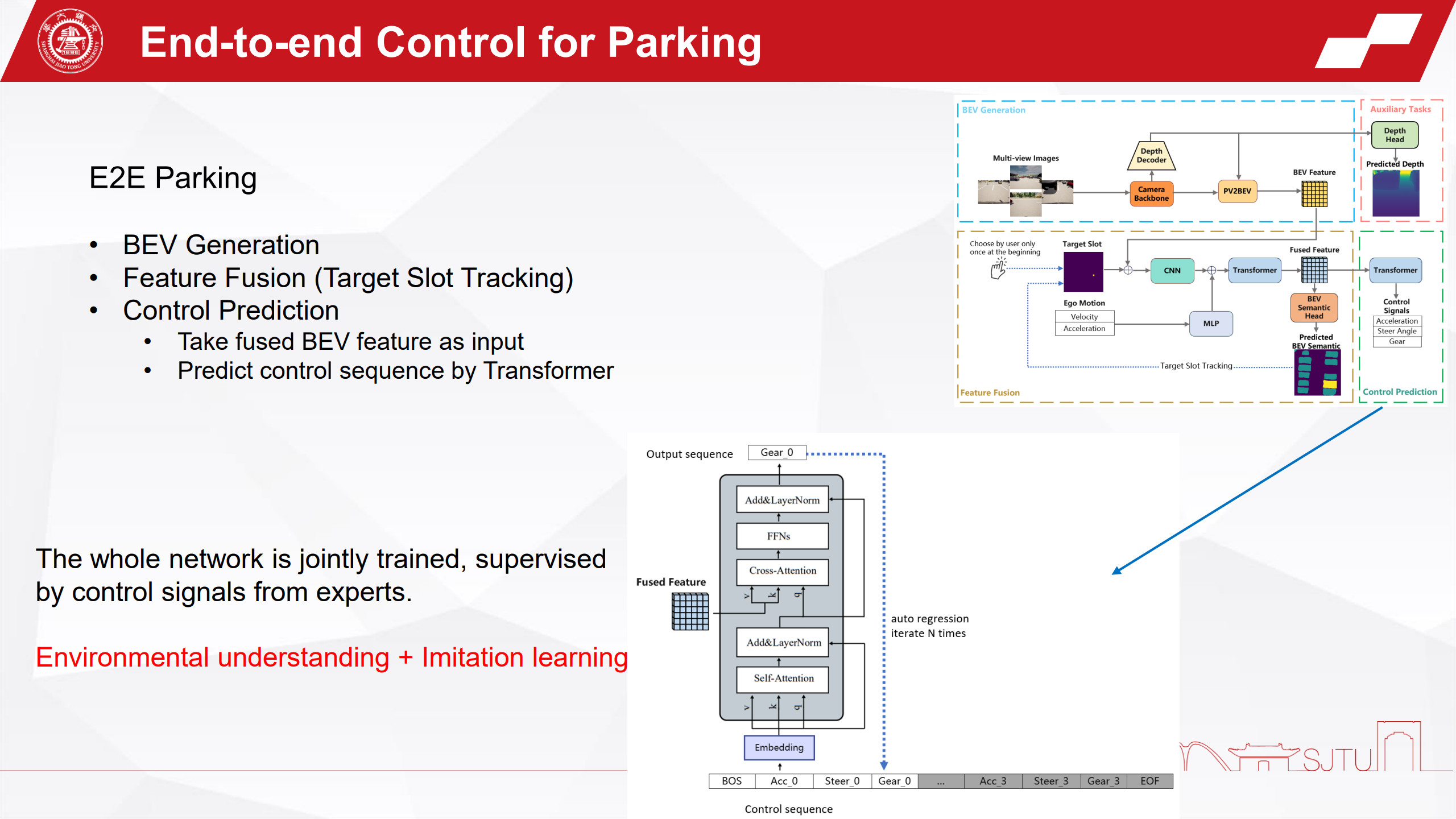
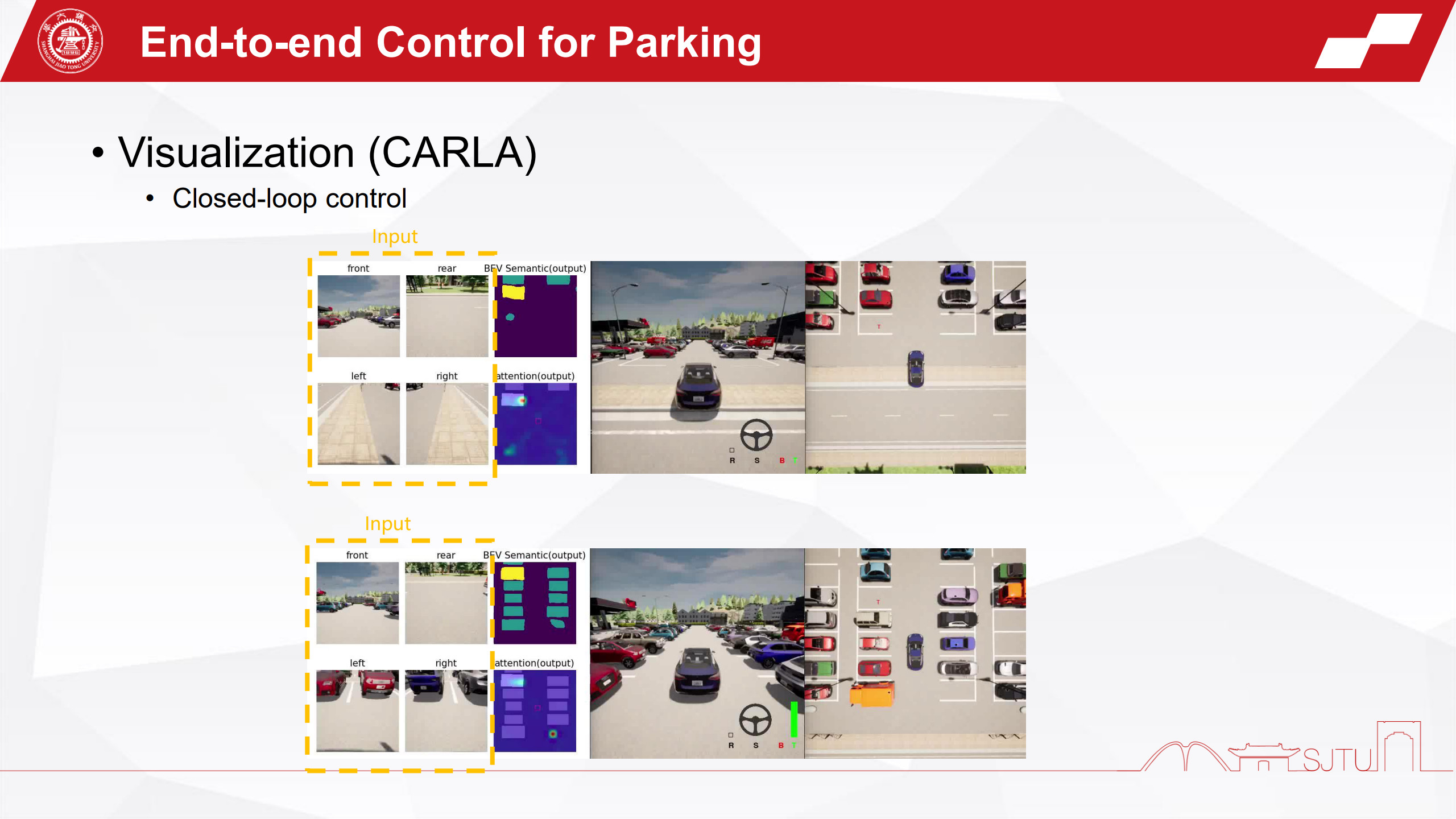
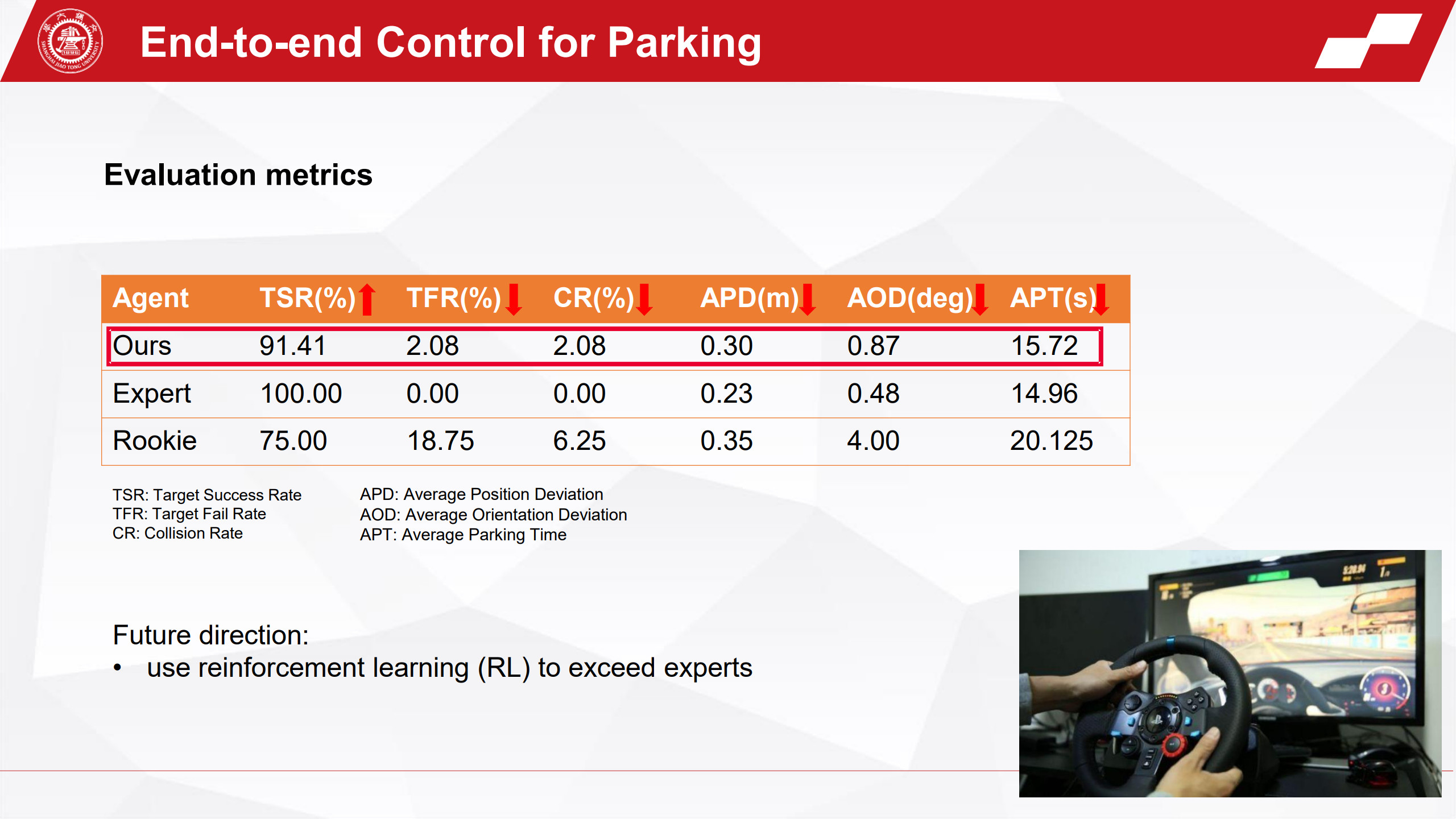
报告:自动驾驶端到端规划与控制