课程中心
公开课
具身实验室
企业服务
企业内训
企业招聘
高校合作
课程中心
公开课
具身实验室
企业服务
企业内训
企业招聘
高校合作
登录/注册
登录/注册
登录/注册
登录 /注册
课程中心
公开课
具身实验室
企业服务
企业内训
企业招聘
高校合作
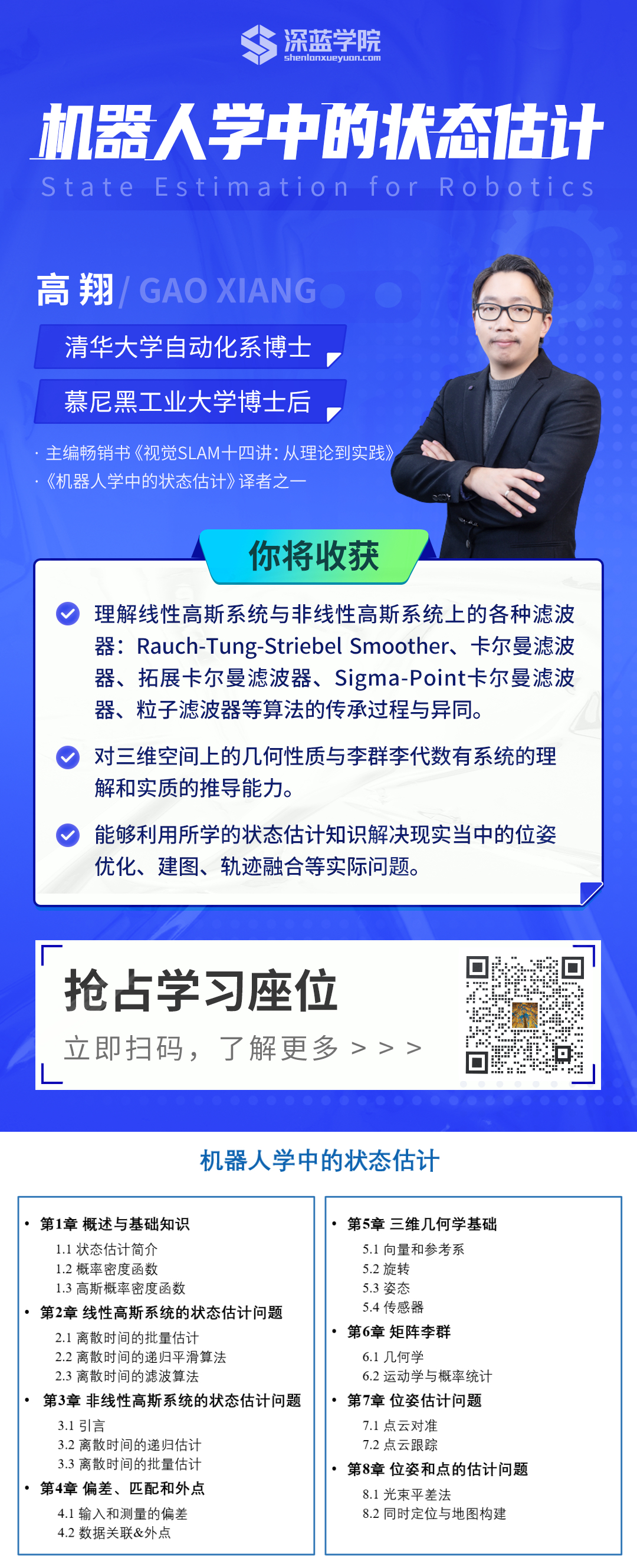
机器人中的状态估计