


-

学习时长
3天线下实战
-

答疑服务
1个月线上答疑辅导


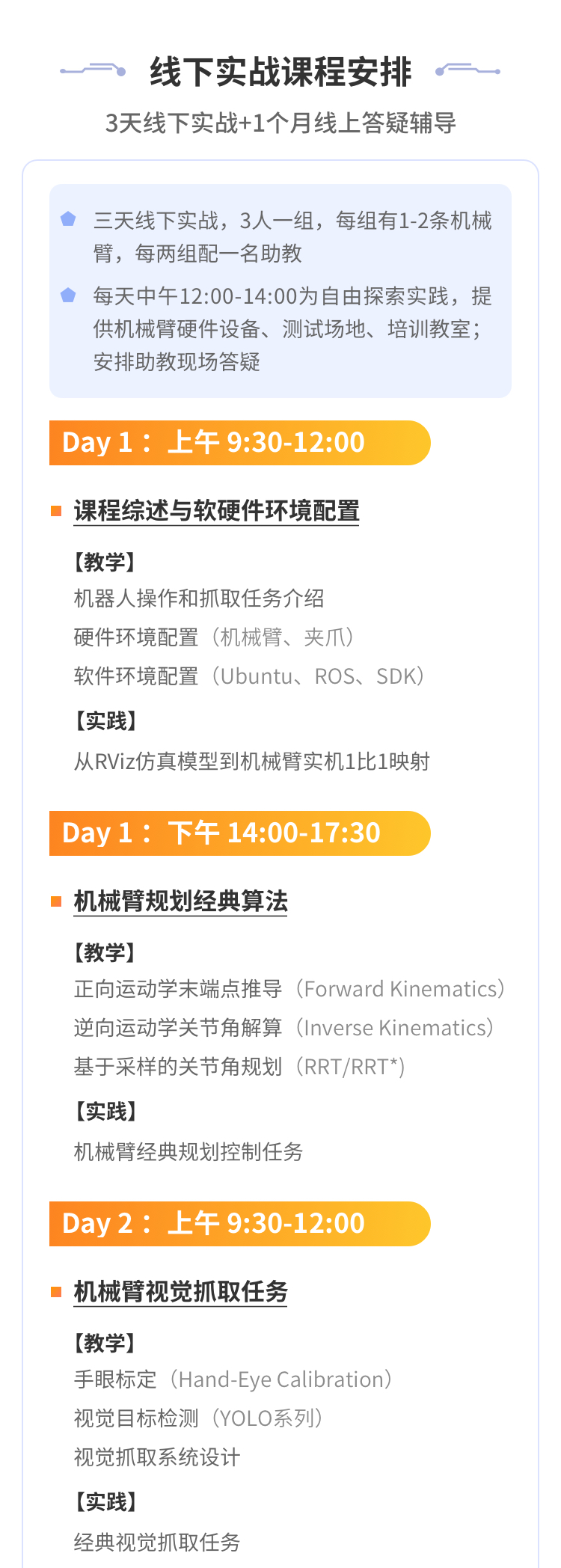
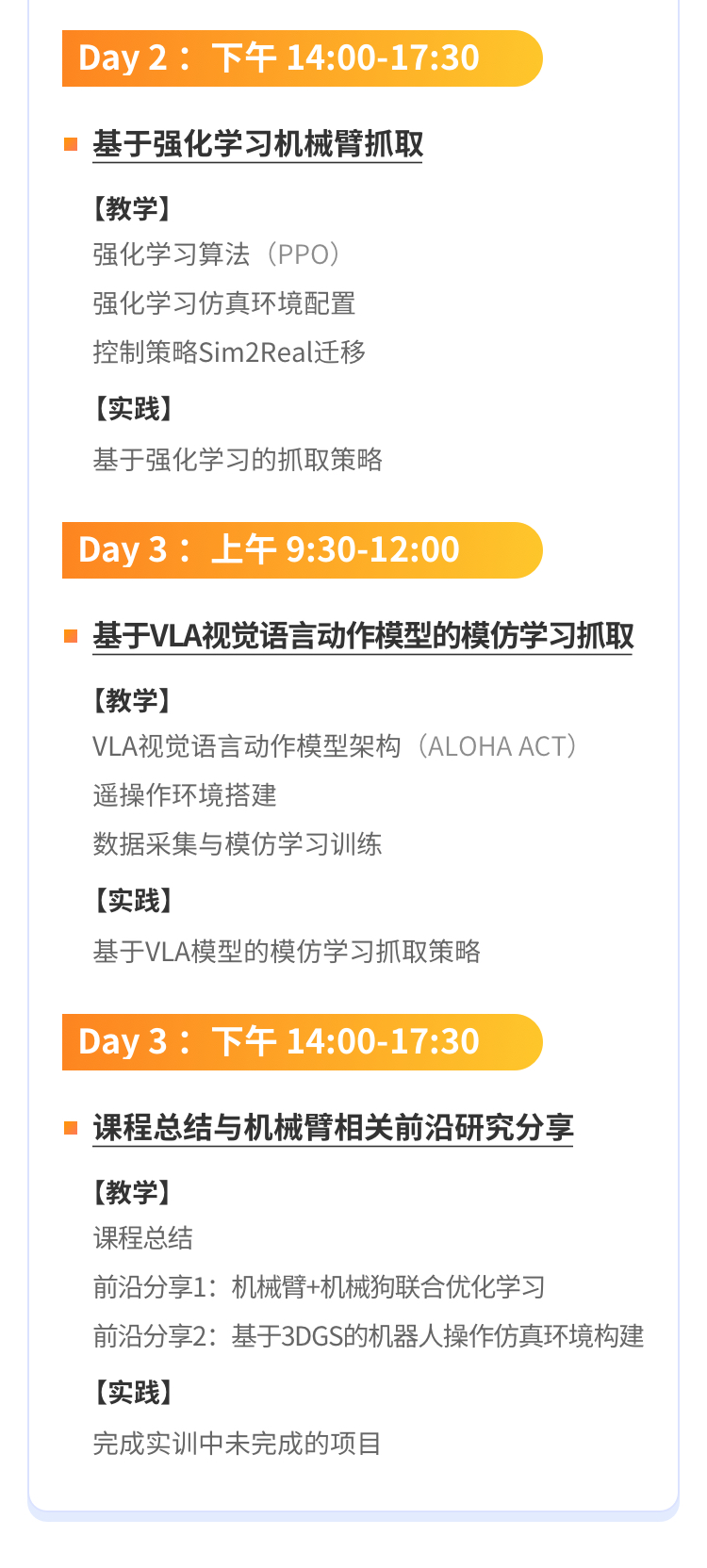



机械臂虚实映射与智能规划实战
实现RViz模型与真机1:1精准映射,集成RRT*路径规划与逆运动学算法,解决机械臂控制与避障问题
视觉引导智能抓取技术实训
结合机器视觉,采用规则算法与强化学习双路径,实现特定目标物体的精准识别与自适应抓取

遥操作数据驱动的模仿学习实战
搭建1比1遥操作数据采集平台,基于视觉语言VLA模型完成模仿学习训练,实现人类操作技能向机械臂的高效迁移与实机应用








3天线下实战
1个月线上答疑辅导
机械臂虚实映射与智能规划实战
实现RViz模型与真机1:1精准映射,集成RRT*路径规划与逆运动学算法,解决机械臂控制与避障问题
视觉引导智能抓取技术实训
结合机器视觉,采用规则算法与强化学习双路径,实现特定目标物体的精准识别与自适应抓取
遥操作数据驱动的模仿学习实战
搭建1比1遥操作数据采集平台,基于视觉语言VLA模型完成模仿学习训练,实现人类操作技能向机械臂的高效迁移与实机应用















