分享至
主讲人:杨恺伦 | 湖南大学机器人学院副教授
2023.03.31 20:00
102分钟
7224人次学习
立即学习
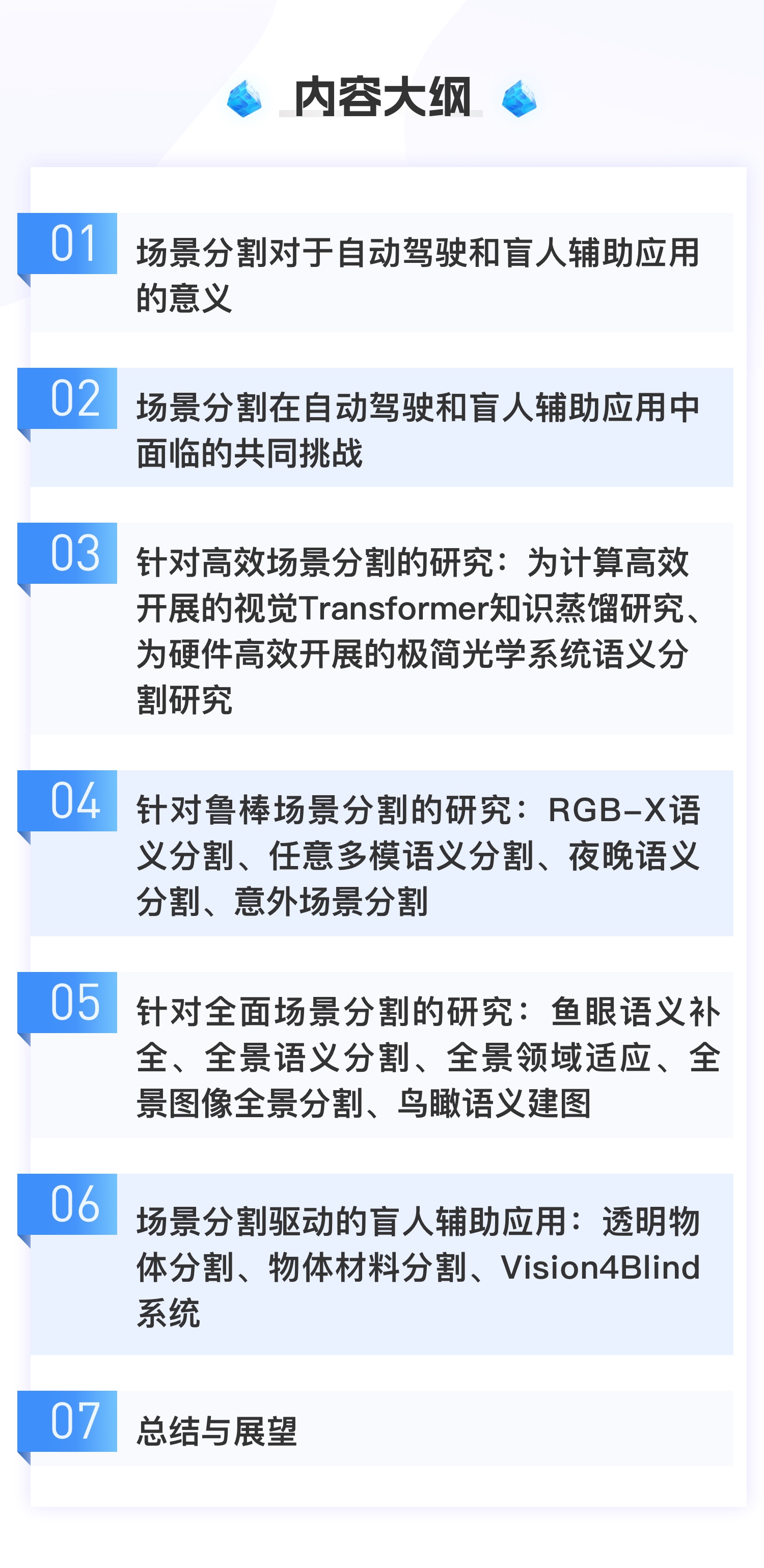
场景分割可以实现像素级的语义理解,对于自动驾驶和盲人辅助等应用非常重要。这些对安全性要求高的系统,需要在开放环境中实现高效、鲁棒和全面的场景感知。本talk结合我们最近的研究进展,探讨面向自动驾驶、盲人辅助的高效、鲁棒和全面场景分割,涵盖了视觉Transformer知识蒸馏驱动的高效语义分割、极简光学系统语义分割、RGB-X语义分割、任意多模语义分割、夜晚语义分割、意外场景分割、透明物体分割、物体材料分割、鱼眼语义补全、全景语义分割、全景领域适应、全景图像全景分割、鸟瞰语义建图等问题,并给出一些方向性思考。
报名成功
添加欣然获取【课件】
点此立即学习
添加微信领取课件
一定记得备注【场景分割】



















 报名成功
报名成功