课程价格 :
¥799.00
剩余名额
0
-

学习时长
9周/建议每周8个小时
-

答疑服务
专属微信答疑群/讲师助教均参与
-

作业批改
每章节设计作业/及时批改评优
-

课程有效期
一年/告别拖延,温故知新












- 1:激光SLAM理论与实践环境搭建说明文档.pdf
- 2:激光slam第九期开课仪式.pdf
- 第1章: 激光SLAM简介
- 3:【课件】激光SLAM介绍
- 第1节: 激光雷达工作原理
- 4:【视频】激光雷达工作原理
- 第2节: SLAM定义、分类及框架
- 5:【视频】SLAM定义、分类及框架
- 第3节: 激光SLAM介绍
- 6:【视频】激光SLAM介绍
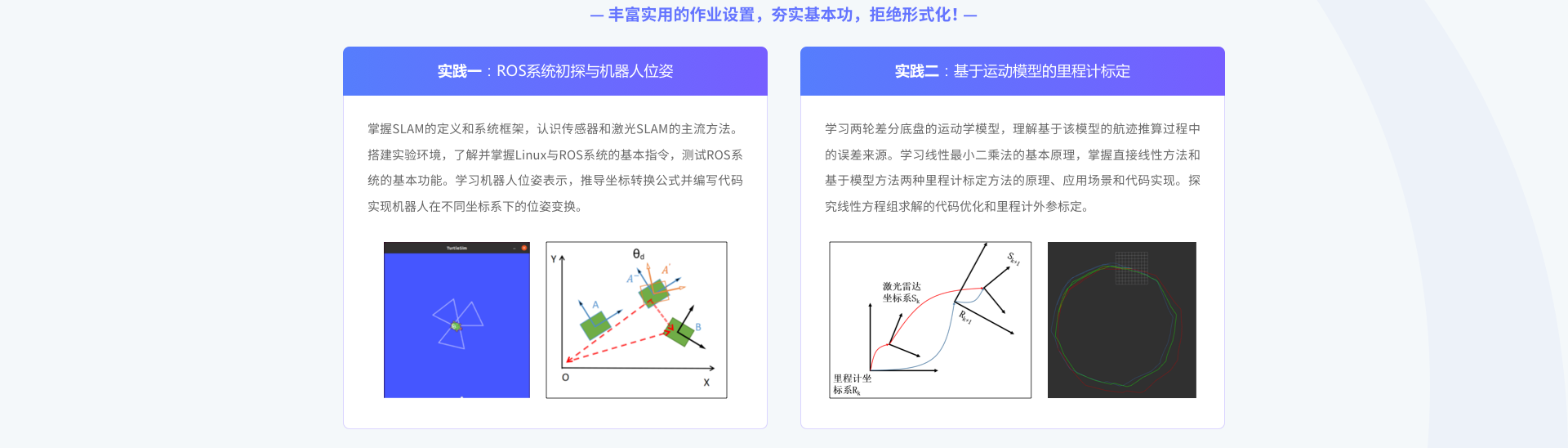
- 第4节: 位姿变换
- 7:【视频】位姿变换
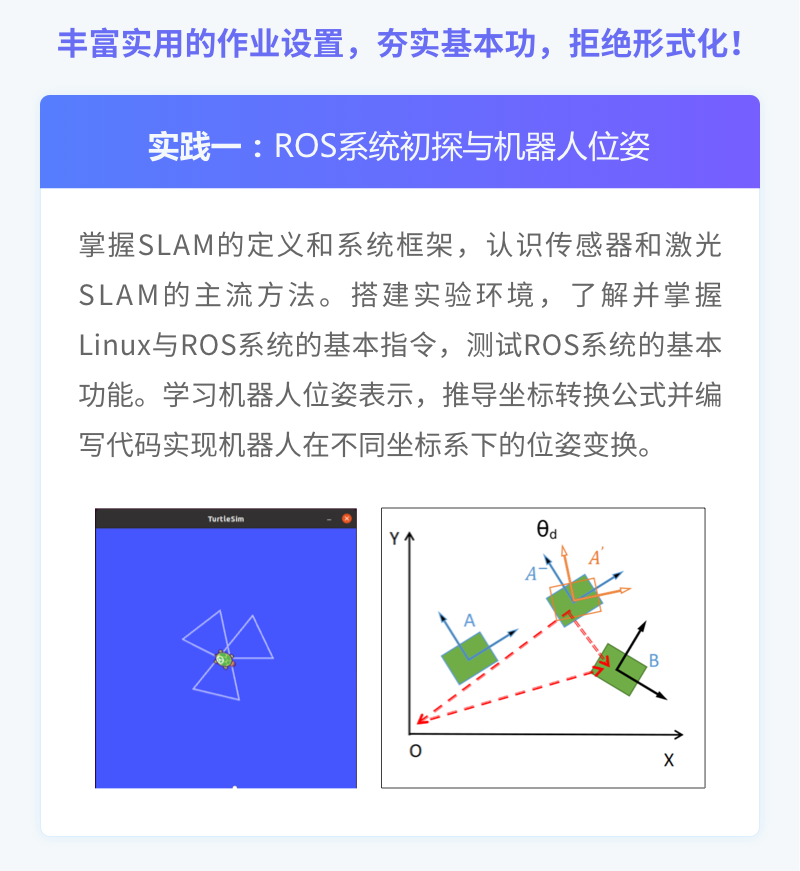
- 第5节: 实践:搭建系统环境
- 8-1:【作业】第一章
- 8-2:第一章思路提示.pdf
- 8-3:激光SLAM第一章作业分享.pdf
- 第2章: 传感器数据处理I:里程计运动模型及标定
- 9:【课件】L2 里程计标定
- 第1节: 里程计运动模型
- 10:【视频】轮式里程计介绍
- 第2节: 里程计标定原理
- 11:【视频】轮式里程计运动模型
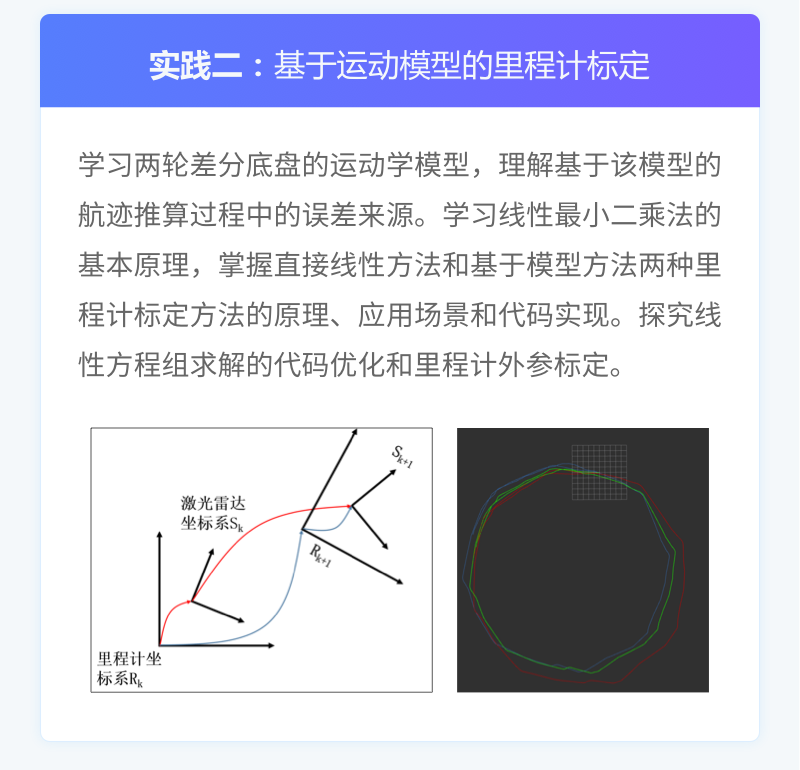
- 第3节: 实践:里程计标定
- 12:【视频】轮式里程计标定
- 第4节: 实践作业
- 13:【视频】轮式里程计标定代码实践
- 14-1:【作业】第二章
- 14-2:第二章作业思路提示.pdf
- 14-3:【视频】第二章作业讲评
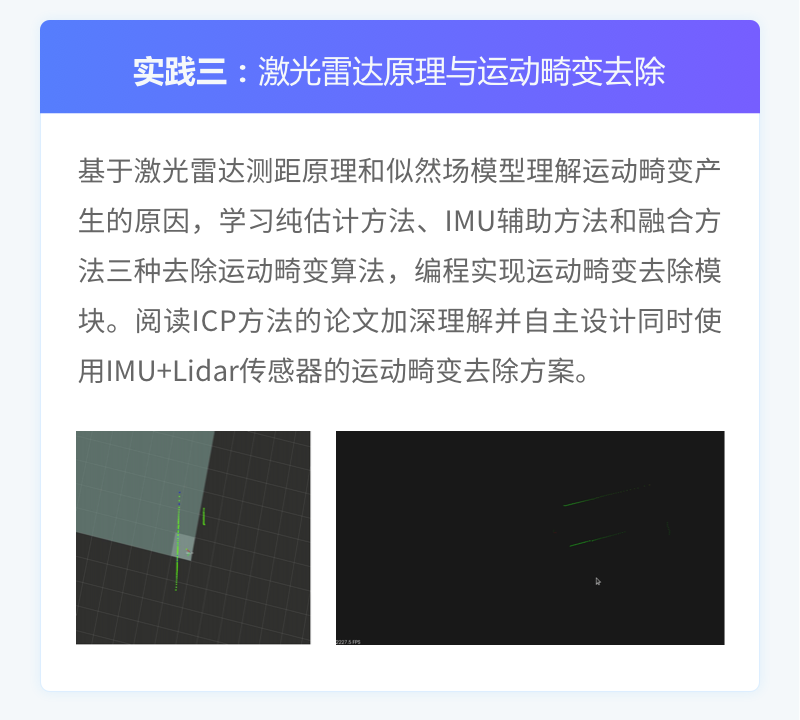
- 第3章: 传感器数据处理II:激光雷达数学模型和运动畸变去除
- 15:【课件】激光雷达畸变去除
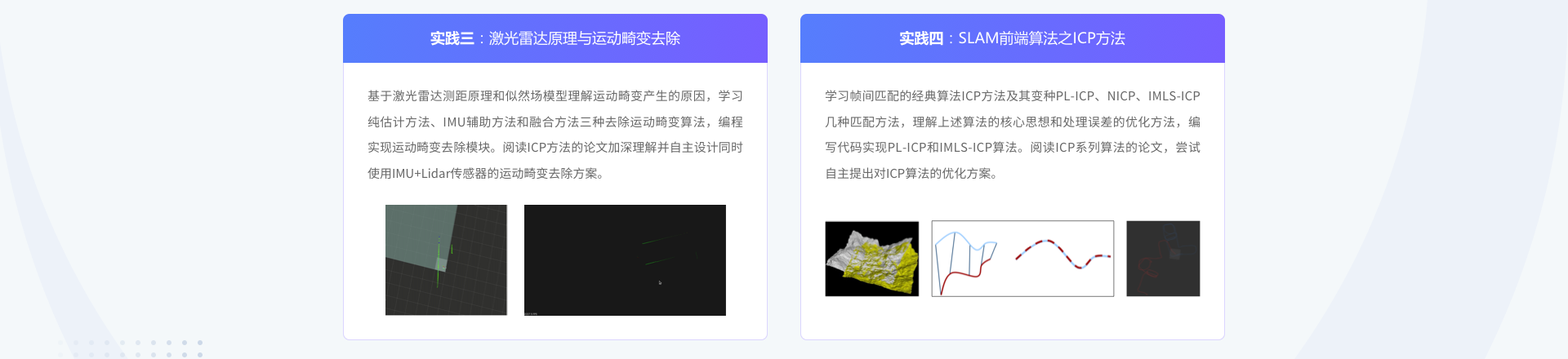
- 第1节: 测距原理与运动畸变
- 16: 【视频】测距原理与运动畸变
- 第2节: 运动畸变去除
- 17:【视频】畸变去除
- 第3节: 实践:激光雷达运动畸变去除
- 18:【视频】运动畸变去除实践讲解
- 第4节: 实践作业
- 19-1:【作业】第三章
- 19-2:第三章思路提示.pdf
- 19-3:【视频】激光slam第三章作业讲解视频
- 19-4:深蓝学院-第三章作业分享-高文文
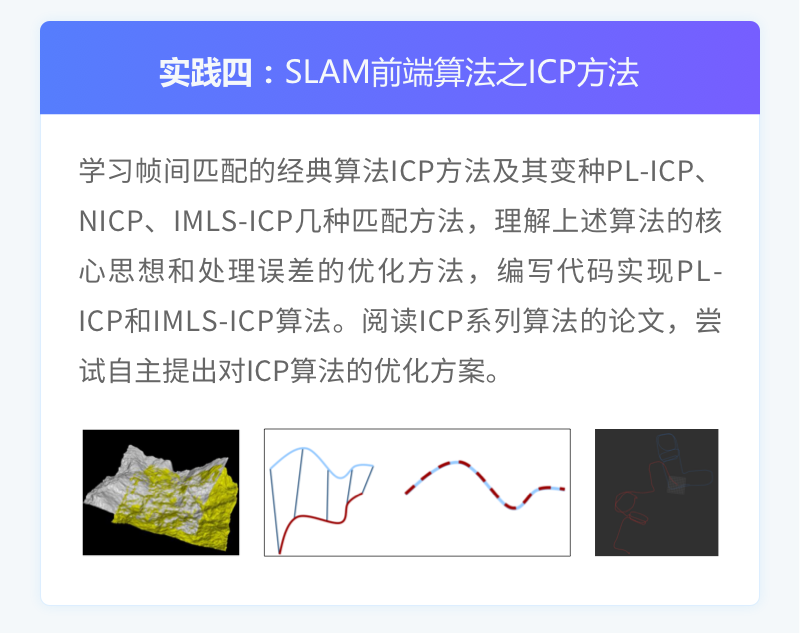
- 第4章: 激光SLAM的前端配准方法 Ⅰ
- 20:【课件】第四课-帧间匹配算法
- 第1节: ICP与PL-ICP算法
- 21:【视频】ICP与PL-ICP算法
- 第2节: NICP
- 22-1:【视频】NICP
- 22-2:【讲义】IMLS(补充内容)
- 第3节: 实践:IMLS-ICP方法实现前端配准
- 23-1:【作业】第四章
- 23-2:第四章作业思路提示.pdf
- 23-3:激光SLAM第四章作业分享.pdf
- 23-4:【视频】激光slam第四章作业讲解视频
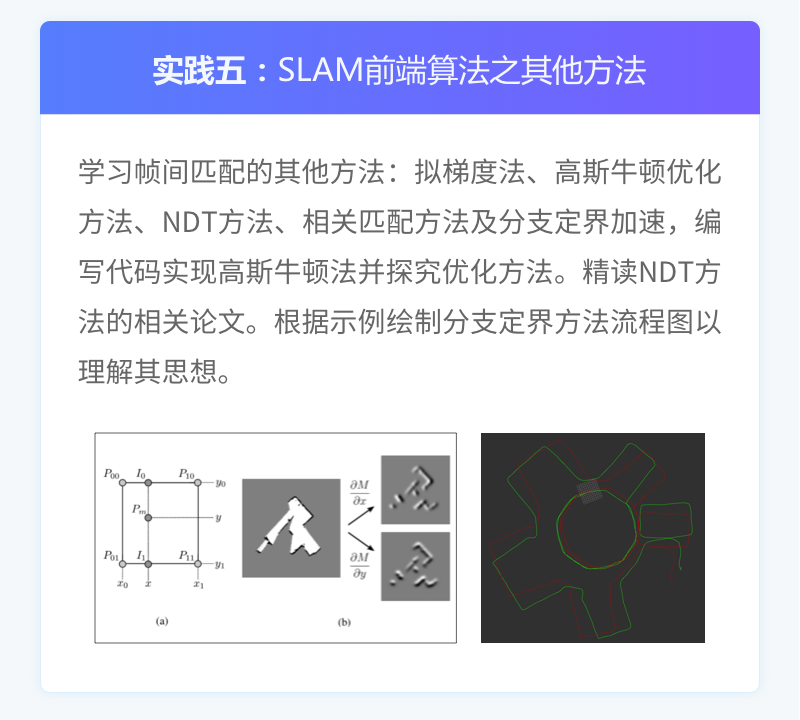
- 第5章: 激光SLAM的前端配准方法 Ⅱ
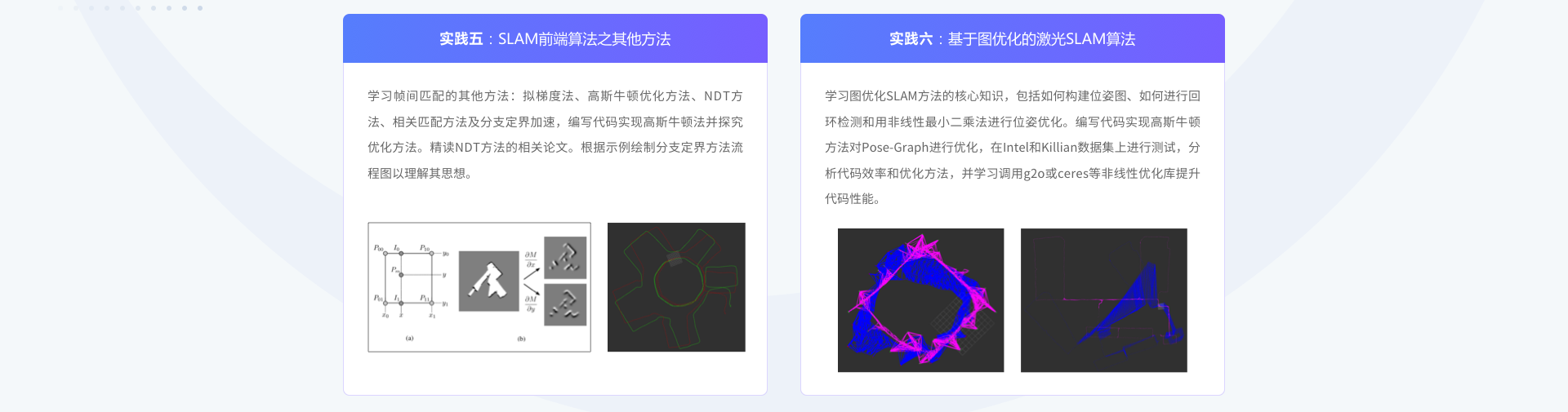
- 第1节: 拟梯度法与高斯牛顿方法
- 24:【课件】帧间匹配算法II
- 25:【视频】爬山法与高斯牛顿优化方法
- 第2节: NDT,相关方法和分支定界方法
- 26:【视频】NDT、相关方法和分支定界方法
- 第3节: 实践:基于优化方法的前端配准
- 27:【视频】基于优化的前端配准方法实践
- 28-1:【作业】第五章
- 28-2:第五章思路提示.pdf
- 28-3:激光SLAM第五次作业分享
- 28-4:【视频】激光slam第五章作业讲解
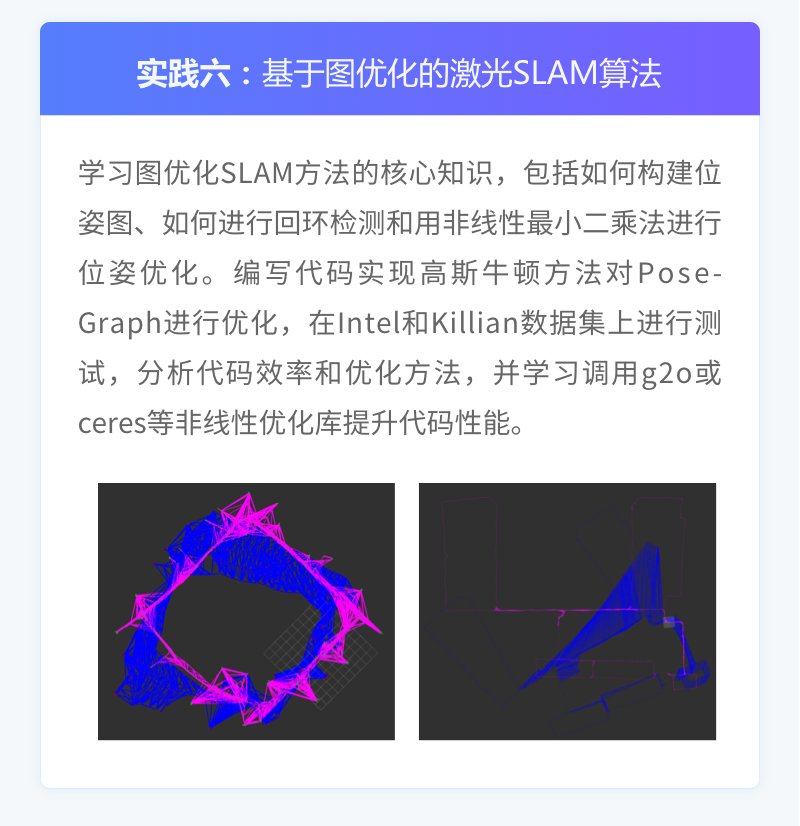
- 第6章: 基于图优化的激光SLAM方法(Grid-based)
- 29:【课件】图优化SLAM算法
- 第1节: Pose Graph的构建及回环检测方法
- 30:【视频】Pose Graph构建以及回环检测方法
- 第2节: 非线性最小二乘原理及其在SLAM中的应用
- 31:【视频】非线性最小二乘及其在SLAM中的应用
- 第3节: Cartographer算法讲解(2020版)
- 32-1:【代码】Cartographer-2020-10-07
- 32-2:【视频】Cartographer新版本代码讲解
- 第4节: 实践:基于优化的SLAM后端
- 33-1:【视频】一个简单的基于优化的SLAM算法实践
- 33-2:【作业】第六章
- 33-3:第六章作业讲评.pdf
- 34-1:深蓝学院激光SLAM第六章作业分享
- 34-2:【视频】第六章作业讲解
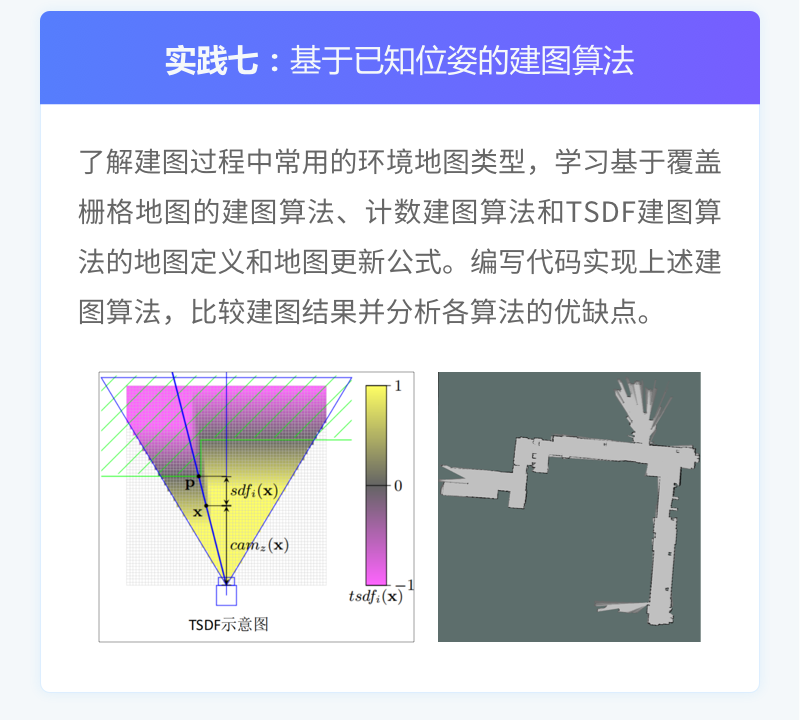
- 第7章: 基于已知定位的建图
- 35-1:【课件】已知定位的构图算法
- 35-2:【资料】grid-maps
- 第1节: 基于占用概率的栅格地图构建
- 36:【视频】覆盖栅格地图算法
- 第2节: 基于TSDF的栅格地图构建
- 37:【视频】计数建图与TSDF
- 第3节: 实践:构建栅格地图
- 38:【视频】栅格地图构建实践
- 39-1:【作业】第七章
- 39-2:第七章作业思路提示.pdf
- 39-3:第七章优秀作业展示.pdf
- 39-4:【视频】 激光slam第七章作业讲解
- 第8章: Life-long Mapping
- 40:【课件】lifelong mapping
- 第1节: life-long Mapping的概念及冗余节点的选择
- 41:【视频】Lifelong Mapping概念及冗余节点选择
- 第2节: Pose-Graph的精确及近似边缘化
- 42:【视频】PoseGraph的稠密近似及稀疏近似
- 第9章: 3D激光SLAM
- 43:【课件】3D激光SLAM
- 第1节: 3D激光SLAM介绍
- 44:【视频】3D激光SLAM
- 第2节: ALOAM
- 45-1:【代码】A-LOAM
- 45-2:【视频】ALOAM代码讲解
- 第3节: 大作业
- 46-1:【作业】大作业说明文档
- 46-2:【视频】作业说明
- 46-3:【作业】大作业
- 47-1:大作业讲评-高文文
- 47-2:【视频】 激光slam课程第九期大作业讲解