课程价格 :
¥17999.00
剩余名额
0
-

学习时长
5天线下教学实践
-

答疑服务
2个月线上答疑辅导




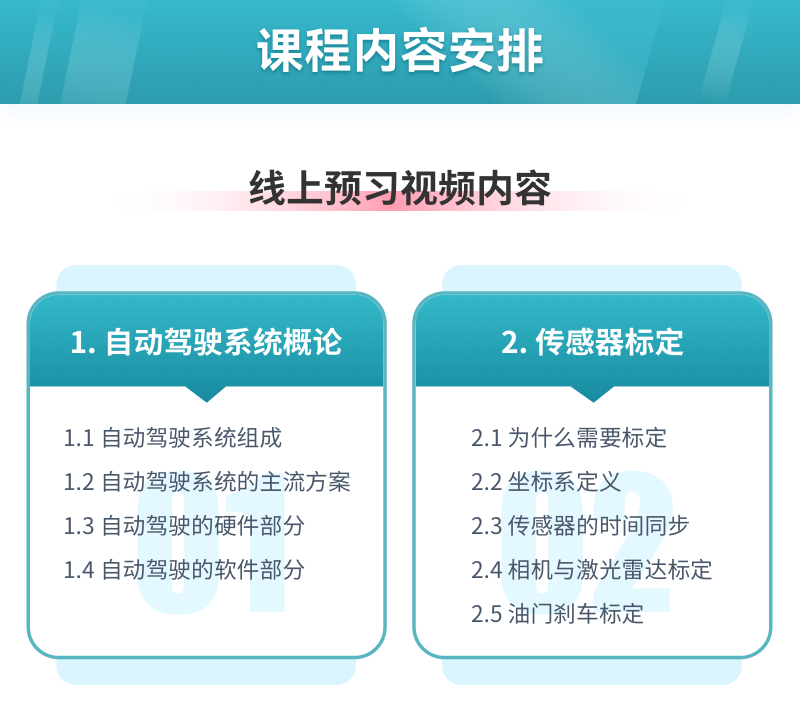

- 第1章: 自动驾驶系统概论
- 第1节: 概论
- 1-1:【课件】自动驾驶系统概论.pdf
- 1-2:【视频】自动驾驶概论
- 第2节: Apollo仿真
- 2-1:【课件】Apollo&LGSVL联合仿真.pdf
- 2-2:【视频】Apollo&LGSVL联合仿真
- 2-3:【视频】仿真环境搭建
- 2-4:【视频】联合仿真对接
- 2-5:【资料】实车实践文档.rar
- 第3节: 硬件安装与实车传感器启动
- 3-1:【课件】硬件安装及遥控器介绍.pdf
- 3-2:【视频】硬件安装与连接
- 3-3:【课件】实车传感器启动实践部分.pdf
- 3-4:【视频】实车启动传感器
- 第4节: Apollo系统代码结构
- 4:【视频】Apollo代码结构梳理
- 第2章: 传感器标定
- 第1节: 传感器标定原理
- 5-1:【课件】传感器标定.pdf
- 5-2:【视频】传感器标定
- 第2节: 标定实践
- 6:【视频】传感器标定实践
- 第3节: 仿真环境下的标定实践
- 7-1:【文档】Apollo&SVL联合仿真(二)标定.pdf
- 7-2:【文档】附录.pdf
- 第4节: 实车标定实践
- 8-1:【文档】实车标定实践.pdf
- 8-2:【文档】使用ROS-UsbCam节点驱动相机并进行标定.pdf
- 第3章: 自动驾驶感知
- 第1节: 环境感知原理
- 9-1:【课件】自动驾驶实践感知.pdf
- 9-2:【视频】自动驾驶感知
- 第2节: 仿真环境下的感知
- 10:【文档】Apollo&SVL联合仿真(四)感知融合.pdf
- 第3节: 实车感知操作
- 11-1:【文档】感知模块操作实践.pdf
- 11-2:【视频】Apollo感知代码:以Lidar感知为例
- 第4章: 自动驾驶定位
- 第1节: 定位方案与原理
- 12-1:【课件】多传感器融合定位.pdf
- 12-2:【视频】自动驾驶定位
- 第2节: 实车定位实践
- 13:【视频】实车定位实践
- 第5章: 自动驾驶规划控制
- 第1节: 规划控制入门
- 14:【视频】规控入门
- 第2节: 规划算法原理
- 15-1:【课件】Apollo中的规划算法.pdf
- 15-2:【视频】Apollo中的规划算法
- 第3节: 控制算法原理
- 16-1:【课件】 Apollo中的控制算法.pdf
- 16-2:【视频】Apollo 中的控制算法


Apollo与SVL联合仿真
Apollo与SVL联合仿真
激光雷达与惯导标定后生成的点云地图
激光雷达与惯导标定后生成的点云地图
相机与激光雷达内、外参标定
相机与激光雷达内、外参标定
定位地图
定位地图
相机与激光雷达融合感知
相机与激光雷达融合感知
无人车绕障
无人车绕障