课程价格 :
¥0.00
剩余名额
728
课程价格:
¥0.00
 支持花呗分期
支持花呗分期
剩余名额:
728个



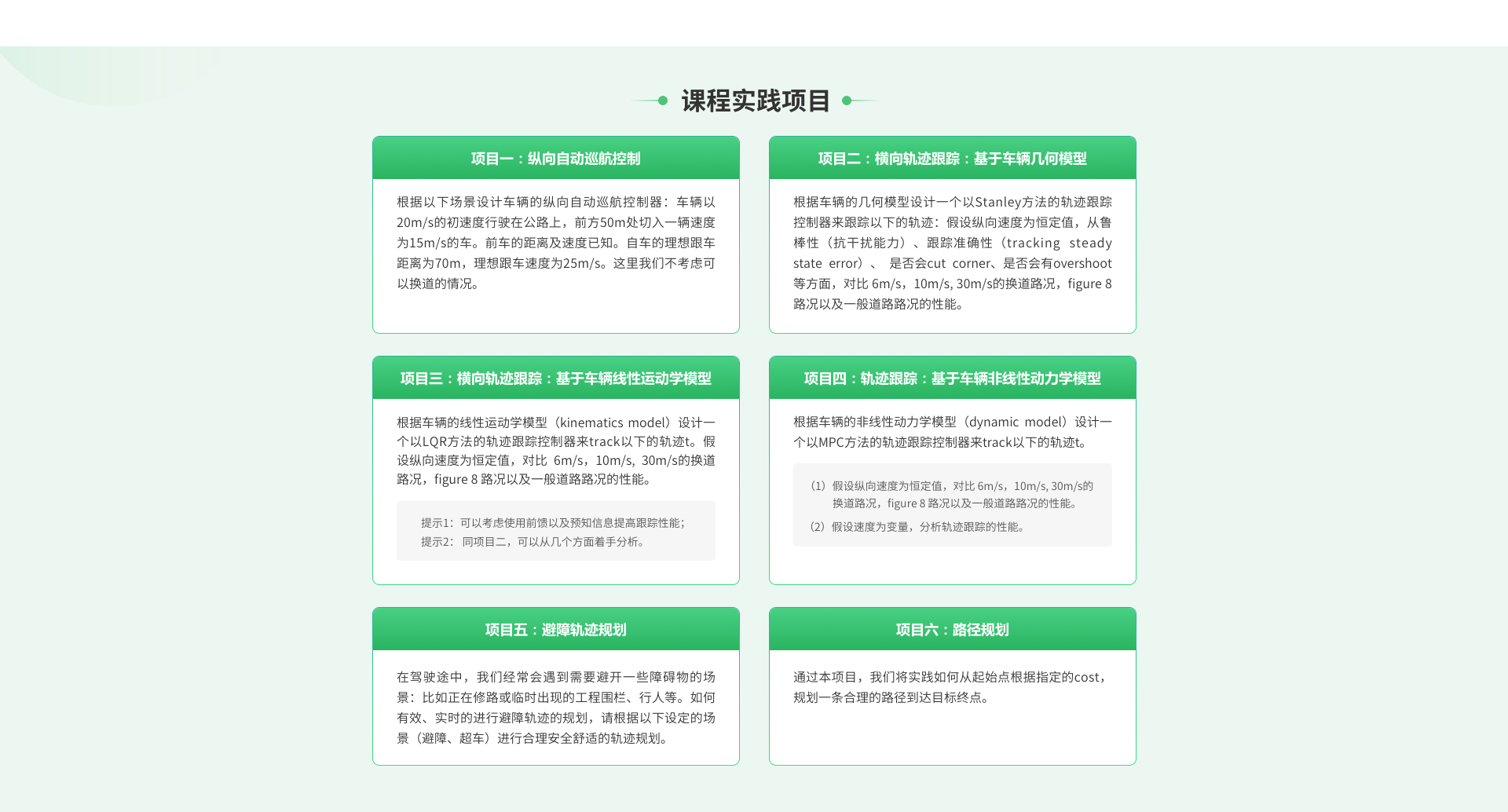
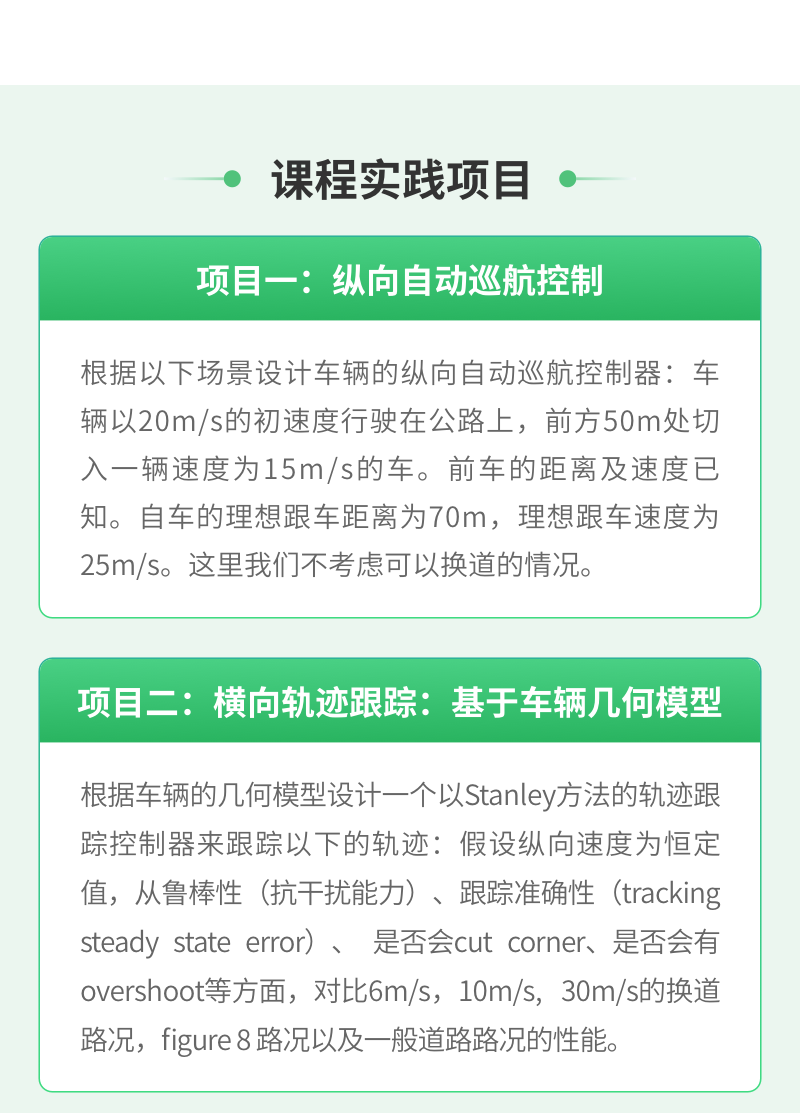
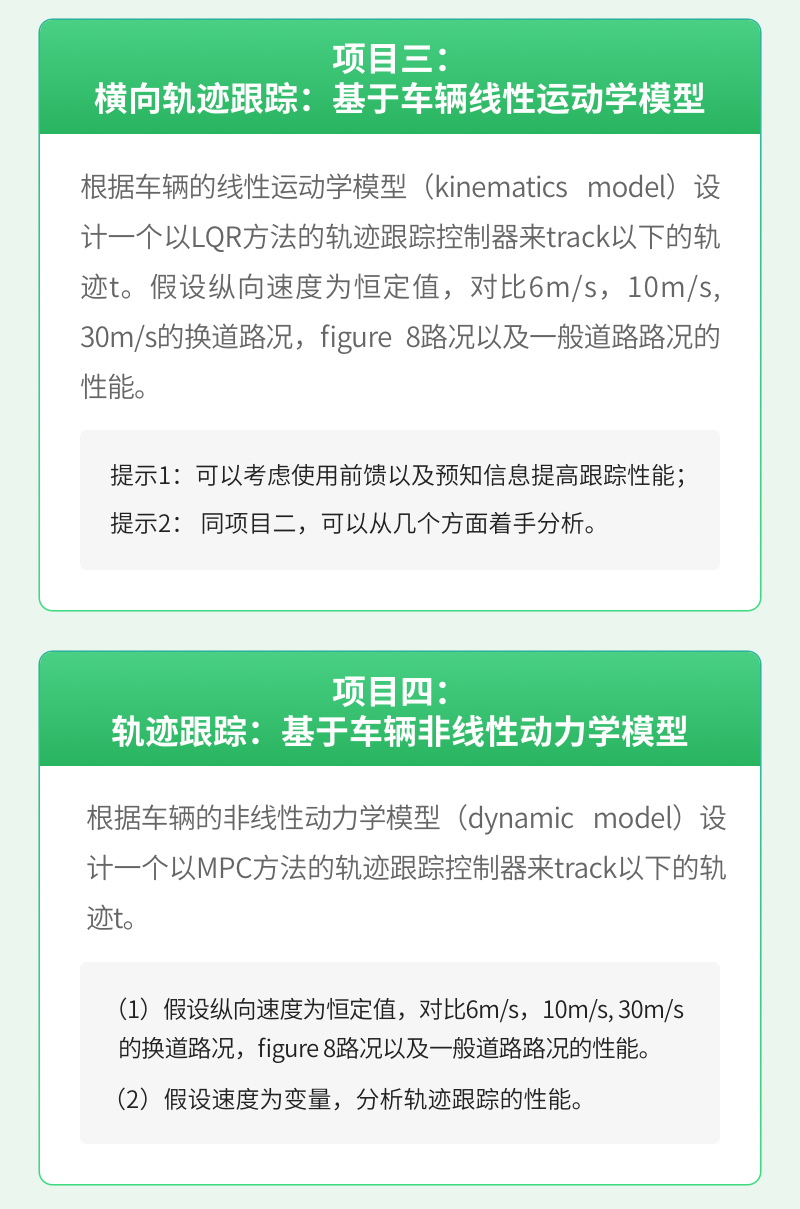
- 1:无人车的基本组成部分以及功能介绍
- 2:规划控制的基本组成
- 3:课程结构-控制、规划
- 4:MPC formulation
- 5:车辆运动模型的构建
- 6:【项目演示】自动驾驶车辆纵向PID控制器
- 7:【项目演示】自动驾驶轨迹跟踪Stanley算法实践
- 8:【项目演示】车辆轨迹跟踪LQR算法
- 9:【项目演示】局部轨迹规划算法lattice planner