课程价格 :
¥5999.00
剩余名额
0
-

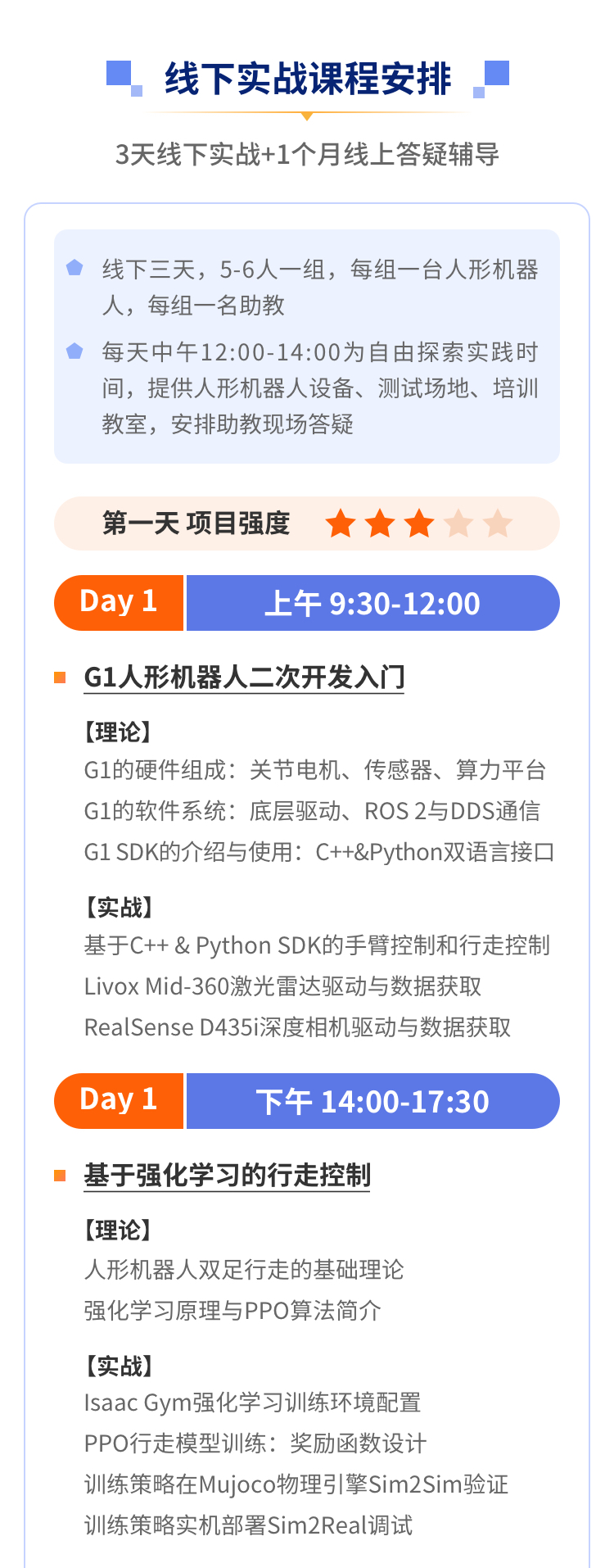
学习时长
线下3天/每天8小时
-

答疑服务
1个月线上答疑辅导
-

作业批改
线下5-6人一组/每组一名助教





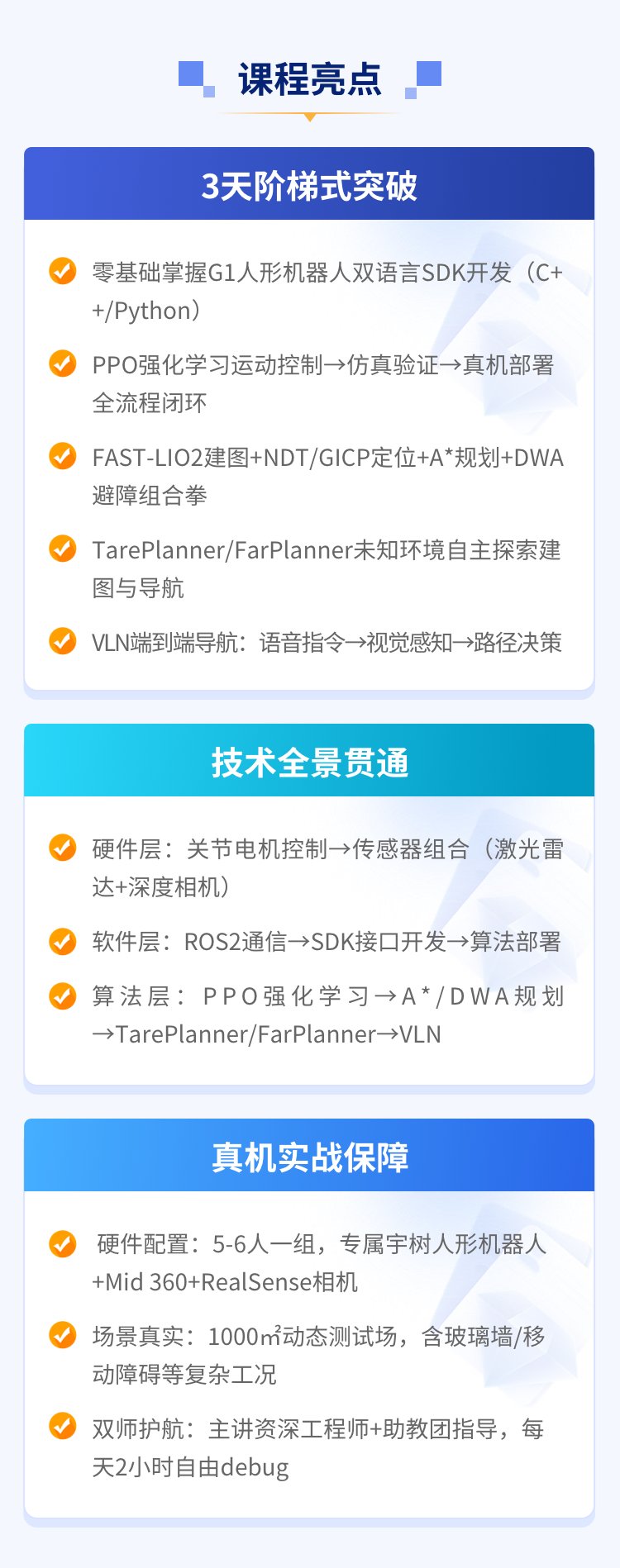



— 强化学习双足行走Sim2Real实战 —
Isaac Gym强化学习仿真训练
Sim2Sim Mujoco物理仿真
Sim2Real强化学习稳定行走
— 建图、定位、规划、避障实战 —
基于Fast-LIO2算法的建图
基于NDT和GICP算法的定位
基于A*和DWA的规划与避障
— 人形机器人自主导航实战 —
— 人形机器人VLN实战 —
TarePlanner自主导航实战
FarPlanner自主导航实战
— 人形机器人VLN实战 —
VLN室内端到端导航实战
- 1-1:【资料】领学文档
- 1-2:【资料】基础环境安装
- 1-3:【视频】英伟达显卡驱动安装教程
- 1-4:【视频】Clash使用教程
- 2-1:【课件】第一天讲义
- 2-2:【课件】第二天讲义
- 2-3:【课件】第三天讲义
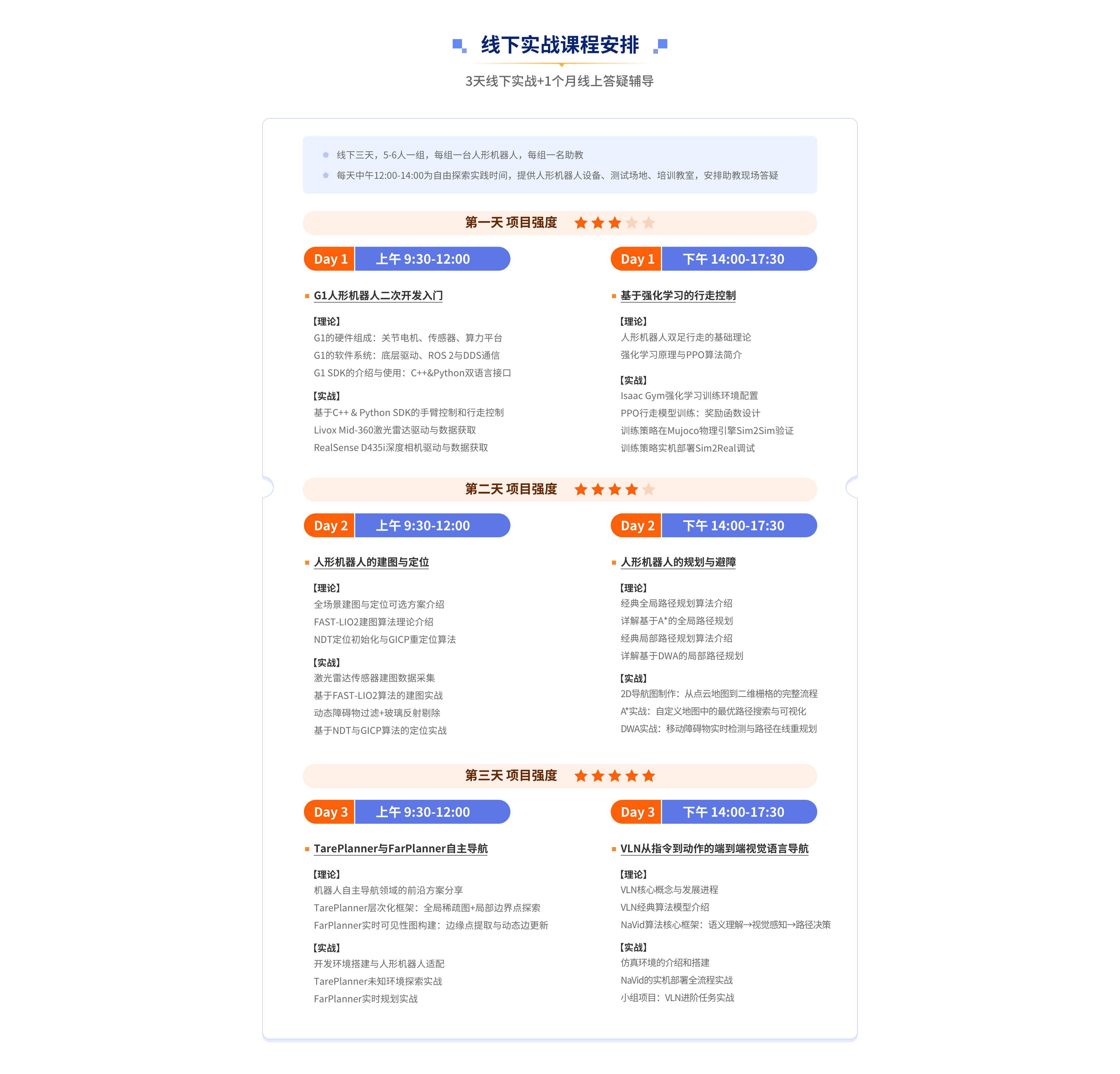
- 第1章: G1人形机器人二次开发入门
- 3:【视频】理论讲解:宇树G1人形机器人软硬件介绍
- 第2章: 基于强化学习的行走控制
- 4:【视频】代码讲解:强化学习训练配置文件
- 第3章: 人形机器人的建图与定位
- 5:【视频】实践指导:FastLio建图清洗数据
- 第4章: 人形机器人的规划与避障
- 6:【视频】实践指导:定位导航避障
- 第5章: TarePlanner 与 FarPlanner 自主导航
- 7:【视频】实践指导:自主探索避障
- 8:【视频】代码讲解:开发环境与TarePlanner
- 9:【视频】代码讲解:FarPlanner
- 第6章: VLN 从指令到动作的端到端视觉语言导航
- 10:【资料】VLN 推理部署