-
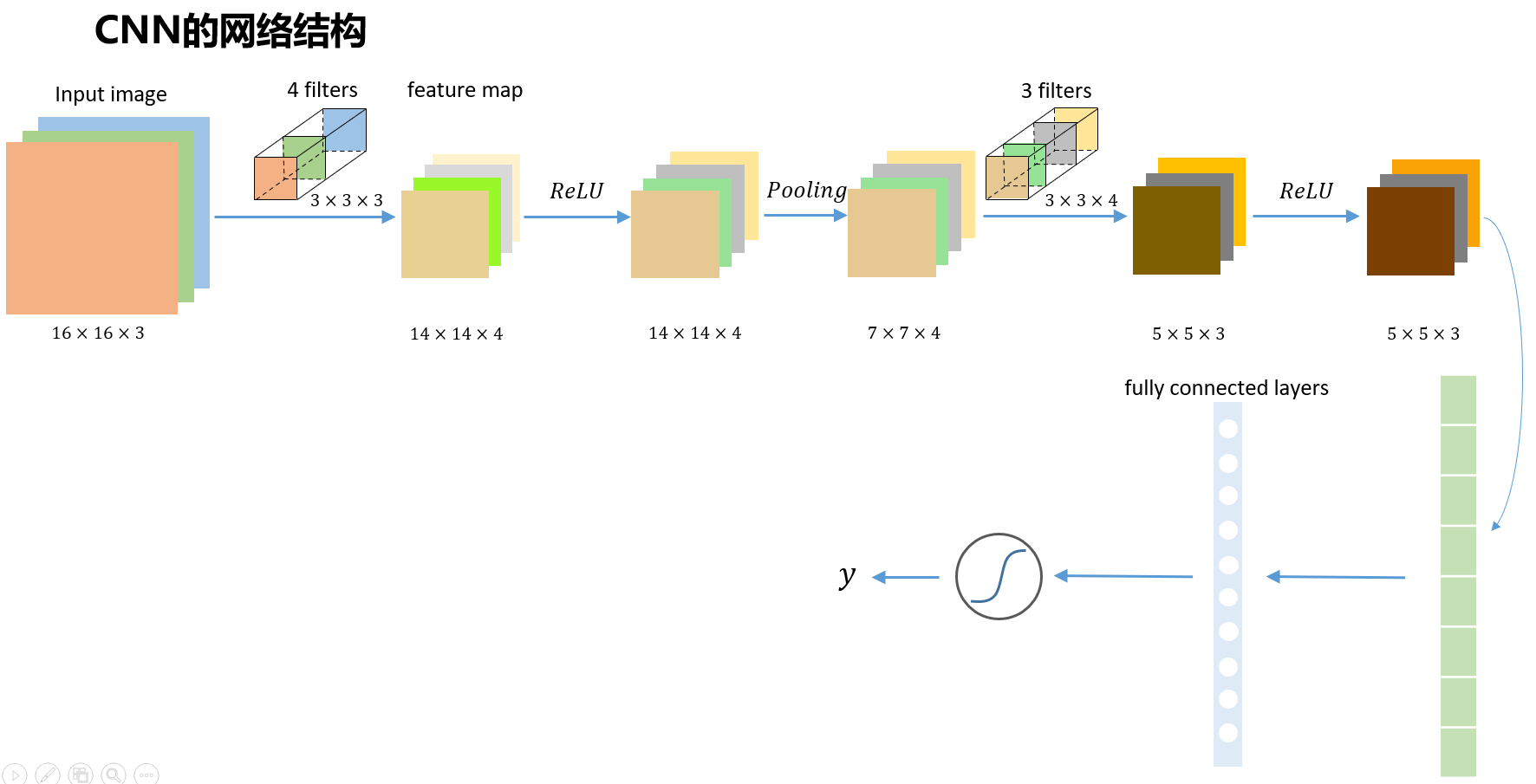
label本身是分类任务的输出。对于一般的分类任务,分类模型得到的不是非0即1的二值,而是一个概率值。比如有10个类别,对于一个输入,模型得到的是10维的向量(如下图中的y),向量表示的含义是预测该输入分别为这10类样本的概率,最终所有这10维中值最大的那一维就是该输入对应的类别。
所以,设置label的方差时,也是从其概率值的角度考虑的。
-
这个并没有理论值,小物体也可以检测,只不过检测率比较低,一般来说就是物体越小,检测率越低。不同算法对小物体的适应性也不同,这个一般就是通过实验观察的,没有理论值。
-
不同频率的传感器,融合时是如何进行的?
——来自《多传感器融合感知- 第一期》·16浏览
融合模块的内存里面会长期维护一个障碍物列表,这个列表就是所谓的状态量。
对所有传感器进行时间戳对齐之后,任何一个传感器以自己的频率发送感知结果给融合模块,后融合模块根据这一传感器的观测都会去更新状态量。可能有同学会问,这样的话,不同传感器更新出来的状态量就没法在同一个时刻了,这时可以将状态量进行预测得到这些传感器同一时刻的状态量。
-
可以使用树莓派4B吗?
——来自《从0制作自主空中机器人- 第一期》·96浏览
不可以吆,刚更新了一篇置顶的计算平台的建议,你看一下。
-
我的学习答案不能提交了吗
——来自《人工智能基础- 第一期》·3浏览
对的,课程已经结课了。
-
选秀的那张ppt有视频讲解吗?
——来自《人工智能基础- 第一期》·4浏览
第几章节的内容呢?
-
你好
——来自《视觉SLAM进阶:从零开始手写VIO- 第七期》·8浏览
这个问题,在具体哪个章节呢,我帮你问一下老师。尽快给您回复。
-
有没有数据分析的案例?大家共享一下
——来自《人工智能基础- 第一期》·10浏览
有的,今天做一个数据分析案例,补充讲解视频哈。
-
第一章没有作业吗?
——来自《人工智能基础- 第一期》·5浏览
第1章节没有作业,第2章节开始就有作业需要提交了。
-
讲师备一下手稿
——来自《深度学习理论与实践(视觉方向)- 第三期》·16浏览
您好,感谢您的意见反馈。课程部分内容重新录制了。
-
关于视频中提到的映射的问题
——来自《线性代数几何意义- 第二期》·25浏览
最好能直接贴个课件的截图
-
这节课是试听吗?
——来自《多传感器融合定位- 第三期》·26浏览
对的,试听课
-
课件地址呢
——来自《语音识别综述- 第一期》·8浏览
您好,课程没有课件哈
-
该视频5分11秒-5分19秒没有声音
——来自《语音识别:从入门到精通- 第三期》·4浏览
那天有同学在群里反馈后,重新更新了视频。烦请您再看一下。
-
什么时候更新后面的部分?
——来自《语音识别综述- 第一期》·13浏览
已经更新完了
-
这种东西谁听得懂呀
——来自《语音识别综述- 第一期》·32浏览
第一部分应该比较容易,但第二部分端到端的内容,还是需要较强的功底。














