

题目列表
什么是可观性?单目SLAM中有几自由度不可观?单目-IMU系统中有几自由度不可观?
相机内参标定时,世界坐标系怎么定义
位姿的插值怎么做
FAST-LIO2的创新点
LeGO-LOAM与LOAM的区别
VinsMono的初始化
ORB-SLAM3的初始化流程
ORB-SLAM2为了特征点均匀化做了哪些处理?
VINS-mono的marg策略
VINS有没有处理FEJ
什么是FEJ
预积分中的bias如何处理
为什么要进行预积分
IMU测量方程是什么?噪声模型是什么?
动态场景对定位和建图分别有什么影响
如何判断是否出现激光退化情况,为什么会出现?如何解决?
在vio做FEJ主要是为了防止哪个自由度由不可观变成可观
ICP配准的解析解法
什么是NDT配准
你知道哪些ICP方法
BA优化中,存在5个相机10个点,假设10个点都能被观测到,求状态矩阵维度、误差矩阵维度、雅各比维度
当相机输出的图像缩小一半,或者从左上角(m,n)处被裁减为一半,则内参如何变化
知道逆深度吗?为什么要使用逆深度?
初始化过程对相机运动的要求
为什么会有单目尺度漂移
介绍下三角测量的过程
单应性矩阵是什么,怎么求解
说一下本质矩阵、基础矩阵,他们分别有几个自由度
描述一下对极几何
ORB特征点及描述子怎么提取
| 如何构建kd-tree? |
| 训练和推理时,BN的均值方差有什么不同? |
| c++手撕2d IOU |
| c++手撕归并排序,将两个有序序列合并成一个有序序列 |
| c++手撕快速排序 |
| 二分类交叉熵公式? |
| Batch Normalization的计算公式? |
| 如何应对softmax的溢出问题? |
| RANSAS拟合平面算法(python) |
| 手写softmax函数 |
| 单应矩阵、基础矩阵、本质矩阵的定义是什么? |
| 卷积特征图计算,给定输入与条件,计算输出特征图尺寸 |
| 有序链表合并 |
手撕NMS(python)
判断点是否在三角形内?
如何判断一个圆与一条线段是否相交?
什么是最小二乘法?
最大似然概率和最大后验概率什么区别?
dropout训练时和推理时有什么不同?
图像分类为什么用交叉熵不用L2?
什么是正交基?
什么是正交向量?
正交矩阵具有哪些性质?
什么是正交矩阵?
什么是L1和L2正则化?
L1 L2的loss的区别与使用场景 ?适用于什么情况?
什么是仿射变换?
什么是Precision和Recall
整数转英文
NMS和softmax区别?
TMUX的原理?
GPU为什么比CPU快?
git reset revert的区别是什么?
多路归并
纹理特征有哪些类别?
为什么点云多帧叠加效果更好?
Second网络中 sparse conv和submanifold sparse conv是什么, 区别是什么?
iou loss的好处?
pointnet++ 的最远点采样如何实现?
pointnet++ 慢的原因?
共享GPU内存和专享GPU内存?
RPN(Region Proposal Network) 和 SSD(Single Shot MultiBox Detector)的区别?
TensorRT 部署流程?
BN推理时可以合并吗?
特征值的意义是什么?为什么要做特征值分解?
点云为什么用kd-tree ?
DBSCAN的优缺点?
融合内外参变了怎么办?
anchor free和anchor based的区别?
多模态特征图融合方式一般有哪几种
网络中时序融合一般采用什么方式
python中值传递 地址传递?
dbscan和k-means的区别,特点?
PCA原理?
ransac原理?
malloc free new delete区别?
一阶梯度下降、二阶梯度下降、高斯牛顿法原理介绍?
指针和引用的区别?
cuda通过什么符号来分配索引线程?
3D IOU计算和2D iou的区别在哪?
深度学习的框架都有哪些?
Softmax的原理
感兴趣区域池化原理(ROI pooling)?
线程共享的资源是什么?
C++全局变量存放位置?
过拟合和欠拟合的区别?
检测的前融合方案有哪些?
模型学习率一般如何设置?
batch_size、epoch、gpu_num,iter, N(标注数据量)之间的关系是怎样的,怎么计算?
batchNorm的区别,BN、LN、IN、GN的区别和应用场景?
模型训练过拟合怎么办?
多态的原理?
虚函数是怎么实现的(纯虚函数是什么)?
PRcurve 如何绘制?
ROC的横纵坐标、ROC如何绘制
图像均值滤波算法
菱形继承是什么?如何解决
python继承?
什么是python的魔法方法?
python的type是什么?type(objcet) 和type(type)是什么?
python如何正确进行列表初始化?
元组中的列表能否修改?
谈谈python一切都是对象?
python的可变类型 不可变类型
相机的逆投影变换IPM原理?
guiedanchor原理?
ATSS原理?
centerpoint的核心是什么?
python深拷贝和浅拷贝的区别?
class 和struct的区别是什么?
CUDA的代码一般流程是?
2D的卷积为什么比3D卷积快?
pointpillars模型对比voxelnet为什么那么快?
在解决超大尺度目标时候,不同尺度的物体如何处理?
对于anchor类检测算法,如何设置合理的anchor?
时序上的标注错误如何自动化修复?
有那些解决样本不均衡的方法?
focal loss原理 ?
分类的loss一般用什么呢?
检测任务的loss一般包括什么?
图像的2D检测和3D检测有什么区别?各有什么优劣
不通过深度学习的方法,如果获取点云边界框的朝向角?
如果路面不平整导致目标具有横滚角和俯仰角,如何计算的?
什么是RPN网络?
faseter RCNN的模型步骤什么?
SSD的模型步骤是什么?
基于体素的点云目标检测的方法流程?比如pointpillar
点云检测常见的几种表征形式是什么?
常用的深度学习优化器有哪些?
Transformer中query的作用? 这种结构可以用卷积来做吗?
BN的原理?主要解决什么问题?BN的参数有多少?
JS散度主要解决什么问题?
二元交叉熵的公式?
交叉熵和KL散度在什么时候是等价的?
交叉熵 KL散度 JS散度三者的关系?
c++中auto关键字的原理是如何实现?
视差图如何转换为深度图?
什么是双目深度估计?
简述CUDA?
并查集算法?
什么是分组卷积?
悬挂指针会导致什么问题? 如何避免?
智能指针分哪几种?
为什么要用指针的引用计数?
智能指针和裸指针之间的差异?
互斥锁是什么?用途是什么?
如何在c++中创建线程?如何在线程间同步?
虚函数、虚函数表的原理是?
std::unorded_map和std::map的区别是什么?
什么是完美转发?
什么是万能引用?
C++中什么是auto关键字?
传递引用和传递值的区别?
函数指针、lambda、仿函数对象分别是什么?
C++函数指针有哪几类?
极线是什么?对极约束是什么? 描述了什么几何关系?
什么是重投影误差?如何计算
径向和切向畸变模型含义,鱼眼模型含义 ?
阐述匈牙利匹配算法?
什么是Deformable attention?
什么是仿射变换?
基于区域生长的地面拟合算法原理?
给定一组点,如何计算其拟合平面? 解释其方法的意义。
常见的点云的registration方法有哪些?
最近邻问题有哪几种典型解法?
RANSAC 算法的原理是什么?
多传感器如何进行时间同步?
ResNet的基本结构的设计思想和优点是什么?
SSD 算法目标检测的原理是什么?
激光雷达如何检测车道线?了解3D车道线构建吗?
自动驾驶汽车红绿灯如何进行检测?这和3D感知有何异同?
进程的通信方式是什么?
BFS和 DFS 的区别是什么?
ROS 的通信机制有哪些?
什么是线程调度?
线程和进程什么区别?
为什么工程实现中一般不使用二叉搜索树?二叉搜索树的弊端是什么?
二叉搜索树的定义与性质?
什么是虚拟内存?
什么是哈希冲突,如何解决?
python中字典的底层实现是什么?
什么是通用矩阵乘(GEMM)优化算法?
open3D中张量是什么?
NDT点云配准算法原理
点面ICP的原理
梯度消失和梯度爆炸的解决办法?
梯度消失和梯度爆炸的原因?
毫米波雷达如何标定?
激光雷达如何标定?
相机外参标定方法有哪些?
什么是相机内参标定?
什么是多传感器的外参标定?
DBSCAN和Kmeans的区别?
常见的点云聚类算法有哪些?
点云遇到雨雾等问题如何解决?
LRU实现(C++)?
pytorch实现 MN个框的IOU
搜索旋转排序数组
判断N条线段的交点 C++
使用DFS实现拓扑排序
均值与方差如何计算?
如何计算多边形面积?
手撕NMS
字符串最长不重复字串
python实现K-menas
'' 幼儿园里一共有身高各不相同的小朋友n个,大家先按照从低到高的顺序站好队,然后开始跳起了“轮转舞”,即最后一名小朋友走到最前面,得到新的列队。例如,原来身高记为 nums = [0,1,2,4,5,6,7] 在轮转后可能得到: 若轮转 4 次,则可以得到 [4,5,6,7,0,1,2] 若轮转 7 次,则可以得到 [0,1,2,4,5,6,7] 注意,数组 [a[0], a[1], a[2], ..., a[n-1]] 轮转一次 的结果为数组 [a[n-1], a[0], a[1], a[2], ..., a[n-2]] 。 现在给你轮转之后的身高数值,返回身高最矮的小朋友的身高值。 ''
小明和小红玩一个游戏:从若干带有分数的小球上依照规则拿出分数之和最多的小球。 小球相连摆放,只有一个球为起点,我们称之为“根”。 除了“根”之外,每个小球有且只有一个“父“小球与之相连。一番侦察之后,聪明的小明意识到 “所有小球的排列类似于一棵二叉树”。 不能同时选择两个相连的小球。 计算在该规则下,小明能获得的最高分数。
给一个数组array 和一个数字sum,求这个数组的连续子数组的元素相加和>=sum的解的个数
滑动窗口的最大值
二分法求幂
质因数分解
实心矩形小岛
平均池化
判断点是否在3D框内?
蛇梯棋 leetcode
腐烂的橘子 leetcode
多数元素 II leetcode
出现频率最高的 k 个数字 leetcode
数组转层序遍历
给定一个矩阵,找出一个具有最大和的子矩阵,返回一个数组 [r1, c1, r2, c2],其中 r1, c1 分别代表子矩阵左上角的行号和列号,r2, c2 分别代表右下角的行号和列号。若有多个满足条件的子矩阵,返回任意一个均可。 e.g. 0 -2 -7 0 9 2 -6 2 -4 1 -4 1 -1 8 0 -2 输出 9 2 -4 1 -1 8 ->最大和15,返回[1, 0, 3, 1]
给定一个数组,找出一个具有最大和的连续子数组,返回其最大和 e.g. nums = [-2,1,-3,4,-1,2,1,-5,4] 输出 [4,-1,2,1] -> 6
寻找给定数组的第k大的数,要求O1的空间复杂度
重排链表 leetcode 线性表
转置矩阵 leetcode
字符串相加
不同的二叉搜索树 leetcode
一个长度为n的数组,求其中出现次数大于n/2的元素,要求线性时间复杂度。
求二叉树的右视图
买卖股票的最佳时机 leetcode
链表的中间结点 leetcode
螺旋矩阵II:leetcode原题(python 模拟边界)
螺旋矩阵:leetcode原题
爬梯子:leetcode原题(矩阵快速幂)
计算岛屿数量 leetcode
平衡二叉树
合并k个升序列表,可采用优先队列优化
合并区间,leetcode原题
快速幂
手撕resnet残差块的网络结构
求连续子数组的最大和(C++) 分治法求解
如何利用谓词对给定容器进行自定义排序?
利用PCL库实现NDT?
DBSCAN代码(python)
判断点是否在三角形内?
如何判断一个圆与一条线段是否相交?
什么是最小二乘法?
最大似然概率和最大后验概率什么区别?
dropout训练时和推理时有什么不同?
图像分类为什么用交叉熵不用L2?
什么是正交基?
什么是正交向量?
正交矩阵具有哪些性质?
什么是正交矩阵?
什么是L1和L2正则化?
.L1 L2的loss的区别与使用场景 ?适用于什么情况?
什么是仿射变换?
什么是Precision和Recall
pytorch实现 MN个框的IOU
整数转英文
NMS和softmax区别?
'' 幼儿园里一共有身高各不相同的小朋友n个,大家先按照从低到高的顺序站好队,然后开始跳起了“轮转舞”,即最后一名小朋友走到最前面,得到新的列队。例如,原来身高记为 nums = [0,1,2,4,5,6,7] 在轮转后可能得到: 若轮转 4 次,则可以得到 [4,5,6,7,0,1,2] 若轮转 7 次,则可以得到 [0,1,2,4,5,6,7] 注意,数组 [a[0], a[1], a[2], ..., a[n-1]] 轮转一次 的结果为数组 [a[n-1], a[0], a[1], a[2], ..., a[n-2]] 。 现在给你轮转之后的身高数值,返回身高最矮的小朋友的身高值。 '''
搜索旋转排序数组
TMUX的原理?
小明和小红玩一个游戏:从若干带有分数的小球上依照规则拿出分数之和最多的小球。 小球相连摆放,只有一个球为起点,我们称之为“根”。 除了“根”之外,每个小球有且只有一个“父“小球与之相连。一番侦察之后,聪明的小明意识到 “所有小球的排列类似于一棵二叉树”。 不能同时选择两个相连的小球。 计算在该规则下,小明能获得的最高分数。
给一个数组array 和一个数字sum,求这个数组的连续子数组的元素相加和>=sum的解的个数
滑动窗口的最大值
二分法求幂
GPU为什么比CPU快?
git reset revert的区别是什么?
质因数分解
实心矩形小岛
平均池化
多路归并
纹理特征有哪些类别?
判断N条线段的交点 C++
使用DFS实现拓扑排序
均值与方差如何计算?
如何计算多边形面积?
为什么点云多帧叠加效果更好?
Second网络中 sparse conv和submanifold sparse conv是什么, 区别是什么?
iou loss的好处?
pointnet++ 的最远点采样如何实现?
pointnet++ 慢的原因?
共享GPU内存和专享GPU内存?
RPN(Region Proposal Network) 和 SSD(Single Shot MultiBox Detector)的区别?
TensorRT 部署流程?
BN推理时可以合并吗?
判断点是否在3D框内?
蛇梯棋 leetcode
腐烂的橘子 leetcode
特征值的意义是什么?为什么要做特征值分解?
如何构建kd-tree?
点云为什么用kd-tree ?
DBSCAN的优缺点?
多数元素 II leetcode
出现频率最高的 k 个数字 leetcode
融合内外参变了怎么办?
anchor free和anchor based的区别?
多模态特征图融合方式一般有哪几种
网络中时序融合一般采用什么方式
python中值传递 地址传递?
数组转层序遍历
给定一个矩阵,找出一个具有最大和的子矩阵,返回一个数组 [r1, c1, r2, c2],其中 r1, c1 分别代表子矩阵左上角的行号和列号,r2, c2 分别代表右下角的行号和列号。若有多个满足条件的子矩阵,返回任意一个均可。 e.g. 0 -2 -7 0 9 2 -6 2 -4 1 -4 1 -1 8 0 -2 输出 9 2 -4 1 -1 8 ->最大和15,返回[1, 0, 3, 1]
给定一个数组,找出一个具有最大和的连续子数组,返回其最大和 e.g. nums = [-2,1,-3,4,-1,2,1,-5,4] 输出 [4,-1,2,1] -> 6
dbscan和k-means的区别,特点?
PCA原理?
ransac原理?
寻找给定数组的第k大的数,要求O1的空间复杂度
malloc free new delete区别?
重排链表 leetcode 线性表
一阶梯度下降、二阶梯度下降、高斯牛顿法原理介绍?
指针和引用的区别?
cuda通过什么符号来分配索引线程?
3D IOU计算和2D iou的区别在哪?
深度学习的框架都有哪些?
转置矩阵 leetcode
Softmax的原理
手撕NMS
感兴趣区域池化原理(ROI pooling)?
字符串相加
不同的二叉搜索树 leetcode
一个长度为n的数组,求其中出现次数大于n/2的元素,要求线性时间复杂度。
求二叉树的右视图
线程共享的资源是什么?
C++全局变量存放位置?
过拟合和欠拟合的区别?
字符串最长不重复字串
买卖股票的最佳时机 leetcode
链表的中间结点 leetcode
螺旋矩阵II:leetcode原题(python 模拟边界)
螺旋矩阵:leetcode原题
爬梯子:leetcode原题(矩阵快速幂)
训练和推理时,BN的均值方差有什么不同?
检测的前融合方案有哪些?
模型学习率一般如何设置?
batch_size、epoch、gpu_num,iter, N(标注数据量)之间的关系是怎样的,怎么计算?
batchNorm的区别,BN、LN、IN、GN的区别和应用场景?
模型训练过拟合怎么办?
多态的原理?
虚函数是怎么实现的(纯虚函数是什么)?
PRcurve 如何绘制?
ROC的横纵坐标、ROC如何绘制
计算岛屿数量 leetcode
平衡二叉树
图像均值滤波算法
合并k个升序列表,可采用优先队列优化
菱形继承是什么?如何解决
python继承?
什么是python的魔法方法?
python的type是什么?type(objcet) 和type(type)是什么?
python如何正确进行列表初始化?
元组中的列表能否修改?
谈谈python一切都是对象?
python的可变类型 不可变类型
相机的逆投影变换IPM原理?
guiedanchor原理?
ATSS原理?
centerpoint的核心是什么?
c++手撕2d IOU
python深拷贝和浅拷贝的区别?
class 和struct的区别是什么?
c++手撕归并排序,将两个有序序列合并成一个有序序列
c++手撕快速排序
CUDA的代码一般流程是?
2D的卷积为什么比3D卷积快?
pointpillars模型对比voxelnet为什么那么快?
在解决超大尺度目标时候,不同尺度的物体如何处理?
对于anchor类检测算法,如何设置合理的anchor?
时序上的标注错误如何自动化修复?
python实现K-menas
有那些解决样本不均衡的方法?
focal loss原理 ?
分类的loss一般用什么呢?
检测任务的loss一般包括什么?
图像的2D检测和3D检测有什么区别?各有什么优劣
合并区间,leetcode原题
快速幂
二分类交叉熵公式?
Batch Normalization的计算公式?
手撕resnet残差块的网络结构
不通过深度学习的方法,如果获取点云边界框的朝向角?
如果路面不平整导致目标具有横滚角和俯仰角,如何计算的?
什么是RPN网络?
faseter RCNN的模型步骤什么?
SSD的模型步骤是什么?
基于体素的点云目标检测的方法流程?比如pointpillar
点云检测常见的几种表征形式是什么?
求连续子数组的最大和(C++) 分治法求解
SDG ADAM的区别?
常用的深度学习优化器有哪些?
Transformer中query的作用? 这种结构可以用卷积来做吗?
BN的原理?主要解决什么问题?BN的参数有多少?
JS散度主要解决什么问题?
二元交叉熵的公式?
交叉熵和KL散度在什么时候是等价的?
交叉熵 KL散度 JS散度三者的关系?
c++中auto关键字的原理是如何实现?
视差图如何转换为深度图?
什么是双目深度估计?
简述CUDA?
并查集算法?
什么是分组卷积?
悬挂指针会导致什么问题? 如何避免?
智能指针分哪几种?
为什么要用指针的引用计数?
智能指针和裸指针之间的差异?
互斥锁是什么?用途是什么?
如何在c++中创建线程?如何在线程间同步?
虚函数、虚函数表的原理是?
std::unorded_map和std::map的区别是什么?
什么是完美转发?
什么是万能引用?
C++中什么是auto关键字?
传递引用和传递值的区别?
如何利用谓词对给定容器进行自定义排序?
函数指针、lambda、仿函数对象分别是什么?
C++函数指针有哪几类?
极线是什么?对极约束是什么? 描述了什么几何关系?
什么是重投影误差?如何计算
径向和切向畸变模型含义,鱼眼模型含义 ?
阐述匈牙利匹配算法?
什么是Deformable attention?
什么是仿射变换?
如何应对softmax的溢出问题?
手撕NMS(python)
RANSAS拟合平面算法(python)
手写softmax函数
基于区域生长的地面拟合算法原理?
给定一组点,如何计算其拟合平面? 解释其方法的意义。
利用PCL库实现NDT?
常见的点云的registration方法有哪些?
最近邻问题有哪几种典型解法?
RANSAC 算法的原理是什么?
多传感器如何进行时间同步?
单应矩阵、基础矩阵、本质矩阵的定义是什么?
ResNet的基本结构的设计思想和优点是什么?
SSD 算法目标检测的原理是什么?
激光雷达如何检测车道线?了解3D车道线构建吗?
自动驾驶汽车红绿灯如何进行检测?这和3D感知有何异同?
进程的通信方式是什么?
BFS和 DFS 的区别是什么?
ROS 的通信机制有哪些?
LRU实现(C++)?
什么是线程调度?
线程和进程什么区别?
为什么工程实现中一般不使用二叉搜索树?二叉搜索树的弊端是什么?
二叉搜索树的定义与性质?
什么是虚拟内存?
什么是哈希冲突,如何解决?
python中字典的底层实现是什么?
什么是通用矩阵乘(GEMM)优化算法?
open3D中张量是什么?
NDT点云配准算法原理
点面ICP的原理
卷积特征图计算,给定输入与条件,计算输出特征图尺寸
有序链表合并
梯度消失和梯度爆炸的解决办法?
梯度消失和梯度爆炸的原因?
毫米波雷达如何标定?
激光雷达如何标定?
相机外参标定方法有哪些?
什么是相机内参标定?
什么是多传感器的外参标定?
DBSCAN代码(python)
DBSCAN和Kmeans的区别?
常见的点云聚类算法有哪些?
点云遇到雨雾等问题如何解决?
A* 能找到最优路径吗?
高斯牛顿和梯度下降的更新有什么异同点?
高斯牛顿法
非线性最小二乘能不能加硬约束?
怎么求解非线性优化问题?
为什么把 QP 问题从凸优化问题分割出来?
机器人最短路径(参考leetcode不同路径)
Code2: 最大正方形:DP
有权无向图求所有路径:DFS
怎么处理感知不稳的情况?
虚函数的机理?
智能指针的机理
PiesewiseJerk 纵向规划的目标函数式内容?
岛屿数量问题:bfs解法,参考leetcode200
给你一个由小写字母组成的字符串 s ,和一个整数 k 。如果满足下述条件,则可以将字符串 t 视作是 理想字符串 : t 是字符串 s 的一个子序列。 t 中每两个 相邻 字母在字母表中位次的绝对差值小于或等于 k 。 字符串的子序列同样是一个字符串,并且子序列还满足:可以经由其他字符串删除某些字符(也可以不删除)但不改变剩余字符的顺序得到。请返回最长理想字符串的长度,注意:字母表顺序不会循环。例如,'a' 和 'z' 在字母表中位次的绝对差值是 25 ,而不是 1 。
一个 「开心字符串」s 定义为:仅包含小写字母 ['a', 'b', 'c']. 对所有在 1 到 s.length - 1 之间的 i ,满足 s[i] != s[i + 1] (字符串的下标从 1 开始)。比方说,字符串 "abc","ac","b" 和 "abcbabcbcb" 都是开心字符串,但是 "aa","baa" 和 "ababbc" 都不是开心字符串。给你两个整数 n 和 k ,你需要将长度为 n 的所有开心字符串按字典序排序。请你返回排序后的第 k 个开心字符串,如果长度为 n 的开心字符串少于 k 个,那么请你返回 空字符串 。
编译期优化原理?
C++静态多态和动态多态区别
LQR和 iLQR了解吗?
Code2: 终点的最短步数。
找二叉树给定和的路径
Code题目:给定一个n*n的矩阵,表示n个地点之间相互的连通性, -1表示不可连通,非负数整数表示从两点之间的通行时间(起点为行序号,终点为列序号),求给定两点之间的连通性。
系统设计题目:设计一个电梯调度系统
状态值函数推导和动作值函数推导
VINS-Mono中的残差项和状态量分别有哪些?
线性方程Ax=b求解方法有哪些(QR,SVD,LU等矩阵分解方法间区别)
请阐述基础矩阵F与单应矩阵H矩阵的推导以及差别。
描述相机和路标点构成的矩阵,如何用schur加速?
在相机的BA模型中,J如何计算?
已知一对点的变换矩阵T,如何求平面的变换矩阵?
相机 C1 相对相机 C2 的位姿为(R,t),则相机 C2 中的三维点 P 在相机 C1 中的坐标为 ?
Vins里面重力是如何对齐的?
视觉SLAM方案中MSCKF的定位一致性问题产生的原因和改进方法。
假设从IMU系到世界系的转换矩阵是Twi,IMU系到相机系的转换矩阵是Tci,已知一个点在世界系下的坐标,求其在相机系下的坐标,计算重投影误差,并计算其对Twi中旋转矩阵的导数
如何根据概率推导最小二乘?
3D-3D匹配的方法
FEJ是什么?为什么要用FEJ?
Rp怎么对R求导(R是SO3,p是三维点)
BA当中雅可比矩阵的维度与什么有关?
求出的R矩阵不满足旋转矩阵的性质,该怎么做
现代C++的特性,tcp/ip https,如果让你来设计vector,你会怎么实现,会从哪些方面来考虑。
Linux gdb strace
1个是链表(删除倒数第x个元素)1个是堆栈,难度大约easy-medium
讲一讲EMplanner的流程
apollo中的决策体现在哪里
轨迹预测的常见数据集
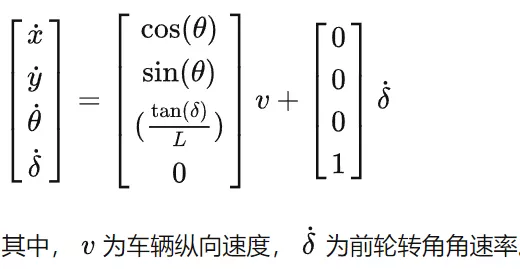
讲一讲车辆运动学模型
是否调试过apollo模块
EMplanner和lattice planner优缺点
EMplanner中的step是什么意思
apollo中常见的设计模式
Actor-critic的更新流程
PPO算法流程
PID参数的作用
强化学习的输入和输出是什么
轨迹预测的指标包括哪些
预测模块和规划控制模块如何结合
参考线平滑的方法
参考线的获取方式
轨迹预测的常见网络包括哪些
路径上DP的cost和QP的cost有什么区别
EMplanner和lattice planner的区别
EMplanner的理解
写出如下问题的C++代码:删除链表倒数第N个节点
谈一谈leetcode medium的难度如何?
在地下车库场景中,特征点较少且相似点云较多,此时应如何进行特征提取?
常用的传统点云处理方法有哪些?
自动驾驶系统主要由哪三个部分组成?并简述各方面的内容。
自动驾驶仿真中的真实性是怎样保证的?
在视觉-惯性导航定位技术VINS中,怎样处理惯性测量单元IMU和图像之间的时间延迟?
请对空间注意力机制进行举例说明。
请问如何计算卷积网络CNN的参数?
请列举一种单目视觉的深度测量方法?
说一下卷积的几种方式,解释深度可分离卷积和说出他的作用。
想从事什么方面的岗位?讲一讲优化的一些知识,优化器等等。
自行车模型中具体是如何实现的?
自动驾驶中车辆有哪些模型,是如何建模的?
在二维平面中,
1)点(1,0)绕原点逆时针旋转30度后再朝(1,0)方向平移1之后的位置是?能否应矩阵乘法表示?
2)点(1,0)朝(1,0)方向平移1之后再绕原点逆时针旋转30度的位置是?能否用矩阵乘法表示?
请用最小二乘法解决以下问题:
1)已知点集P0(x0,y0),P1(x1,y1),…,Pn(xn,yn),请拟合直线y=ax+b,在什么情况下一定会拟合失败?
2)已知点集P0(x0,y0,z0),P1(x1,y1,z1),…,Pn(xn,yn,zn),请拟合平面Ax+By+Cz=0(ABC不同时为0)
说一下之前做的一些ai模型inference加速的事情
简述通用系统组成
简述7层网络模型,并说明IP在哪一层?
简述Python 什么是迭代器生成器和装饰器
说一下Python init和new有什么异同点
【选择题】在你面前有三扇门,其中只有一扇后面有奖品,当你选中一扇门(但未开启)后,主持人开启剩下两扇门的其中一扇,发现后面没有奖品,主持人问你要不要换另一扇仍然关上的门,如果你换了门的话,拿到奖品的概率是? A、1/2 B、3/4 C、2/3 D、1/3
【选择题】哪种数据结构可用于消除递归? A、双向链表 B、队列 C、栈 D、二叉树
【选择题】已知二叉树前序遍历结果是ACDEFBGH,中序遍历结果是DECABFHG,后序遍历结果是? A、BGFEDCHA B、HGFEDCBA C、HGFBEDCA D、EDCBHGFA
哪个场景下使用表锁比较好?
谈一谈mysql,行锁,表锁,悲观锁,乐观锁。有什么个人见解?
说一下python中列表和元组有什么不同?详细讲一下可变对象和不可变对象的区别
简述一下对磁盘碎片的理解,如何实现碎片整理
阐述一下分布式锁如何实现
简述多线程读写锁跟普通锁区别
阐述一下多线程之间如何通信的
代码实现 删除链表倒数第n个结点
代码实现两数之和
代码实现最大不重复子数组
简述如何实现选择排序
简述Select、Epoll区别是什么
进程和线程常见的通信方式有哪些?
C++STL用过vectorstring,函数重载回答不准确,函数重载两种方式回答出成员函数一种。
手写KMeans聚类
简述C++的多态机制、实现原理、作用;
简述排序算法的时间复杂度
TCP数据包的构成有哪些
说一下TCP滑动窗口是什么
简述序列号有什么作用,以及有哪些好处
简述TCP协议和三次握手是什么
针对项目中的业务,比如文件传输,为什么不用一些现成的协议像FTP,你认为你当前的做法好在哪?
简述两种网络模型性能的差别及测压
Windows下完成端口主要用的是哪个API创建的,名字是什么
服务器网络模型,从同步多线程非阻塞说到完成端口
端口号冲突,怎么解决
服务器端能看到客户端连接的是哪个socket吗,怎么做的
Windows下使用TCP的流程,具体到使用的函数方法,都做了什么事情
怎么解决Redis 和 Mysql 的同步问题
Redis 数据类型查询是什么
简述Redis缓存怎么用
mysql innoDB存储引擎的事物锁是什么
单链表可以用哪个时间复杂度nlogn的排序算法
分段反转链表(反转链表的M-N之间的元素,考C++编程)
给一个正整数,需要拆分成一系列正整数使其累加和与给定正整数相等,而乘积最大。
简述静态变量与局部变量的生命周期
用递归和迭代两种方法遍历二叉树
C++手写稀疏矩阵的乘法
使用vector如何避免频繁的内存重新分配?map和 unordered_map的区别?哈希表如何解决键值冲突?
用多线程的方式计算大数量数据求和,该怎么计算
如何将链表反转
代码实现岛屿数量
口述计算点到线段的距离的方法 需要给出计算步骤
合并区间(的变体),合并之后要取反
简述指针和引用的区别
LeetCode题:如何判定二叉树是否另一二叉树的子树
用C语言实现dropout函数
quick sort, bubble sort和merge sort任选2个实现
代码实现归并排序
C语言代码实现二叉树先序转换
构造函数可以是虚函数吗?父类的析构函数可以是虚函数吗?为什么?
父类的私有成员可以被继承吗?
代码实现最长有效括号
代码实现链表,找到环起点
输出一个矩阵的转置矩阵
代码实现旋转数组
说一下智能指针使用过程遇到的问题
Lattice算法的初始点如何选取
代码实现二分查找
用C++实现单链表反转
说一下线程同步的方式有哪些
简述状态机与行为树的区别
说一下C++和一些其他语言有什么差别
简述一下死锁,死锁避免
解释一下进程和线程
32位和64位系统有哪些变量的大小不同
简述结构体对齐规则
vector能不能一边遍历一边对满足特定条件的值进行删除,怎么实现
STL容器有哪些
简述什么是Hash,Hash冲突,Hash扩容
代码实现topk问题
非阻塞和异步的区别和联系
手撕代码:查询最长回文字符串
笔试:写kmeans伪代码(论文里用了kmeans)
代码实现leetcode 64
SVD分解为什么可以求解r和t
简述一下遍历二叉树
简述经典的岛屿问题
leetcode56合并区间
代码:leetcode120三角形最小路径和
(轻舟)用C++实现shared pointer实现
简述一下 bst序列化和反序列化
二维数组最大矩形面积
shared 指针如何实现(给普通指针 写个引用计数器 统计一下 多少变量引用这块内存 为0则删除)
const 的用法写到指针int 类型声明前和int后区别
描述一下有哪些C++八股
用C++实现反转链表
代码实现如何做到快速排序
概率论题:随机三个点在圆上处在同一个半圆内的概率考[数学题]
解释一下红黑树
介绍一下Lambda的表达式
简述一下什么是虚函数
合并有序数组并剔除重复元素
完全二叉树查找最右下角节点,最优解为O(logN*logN)
简述一下C++11与14有哪些新特性
C++ push_back与emplace_back的区别
如何防止内存泄露
简述一下进程与线程的区别
简述一下C++11的特性
问vector是如何实现的
简述虚函数概念
计算x^6 + x – 1 = 0的根,保留5位有效数字
解释一下哈希表的底层冲突问题是什么
简述对原子变量了解
一个类里面如果没有成员变量只有虚函数,那虚函数内存占用几个字节
简述对智能指针的了解
哈希表和红黑树的时间复杂度
二叉树的最大深度leetcode
手写有效的括号 leetcode
手撕代码,设计算法,判断一个边长为n的多边形是凹多边形还是凸多边形,并分析时间复杂度
C++程序在执行中加速的技巧
手写高斯牛顿解方程
代码实现最大子序列和
用代码实现leetcode接雨水
编写C++代码高效实现稀疏矩阵的存储和加减乘除等基本运算。
实现一个string类
二维有序数组(右边元素比左边大,下边元素比上边大),如何查找一个元素的位置(剑指Offer原题)
写一个二分排序
inline关键字含义,和宏替换的区别
C++,给一个vector求第k大的元素
简述一下C++函数名重了的处理方法
介绍一下C++单例模式
static成员和函数
手写二分查找代码
会不会C++
搜索二叉树递归非递归写法
简述石子游戏
简述二叉搜索树相关的问题
简述三角化公式推导
写imageResize,使用双线性插值
求给定二值图像中八邻域连通区域数量(广度优先遍历)
说说岛屿问题
谈谈C++中cast的几种功能
谈谈C++中引用和指针的区别
列举多线程同步的方式有哪些?
简述一下内存泄露是什么原因
简述一下虚函数的使用和含义
简述一下C++智能指针
简述一下C++类型转换
什么是拉格朗日中值定理?使用条件是什么?
说一下最长上升子序列
简述Leetcode33搜索旋转排序数组
简述一下delete/new,mallc/free的区别
字符串中最长不重复字符串
如何管理一个项目,git或者svn?你是怎么处理项目中的log?
简述一下虚表数量是什么
简述一下vector和list的区别
说一下STL常见容器及内部实现的数据结构
C++如何实现只在栈上实例化对象?
简述一下什么是连续,什么是可导?
简单介绍下SPI协议
FreeRTOS线程之间的几种通信方式
王者荣耀游戏中,有10个英雄,若干野怪,如何快速找最近英雄?
什么是多线程,多线程与多任务有什么区别
悬挂指针会导致什么问题?如何避免?
智能指针分哪几种?std::unique_ptr, std::shared_ptr, std::weak_ptr各有何用途?
智能指针和祼指针之间的差异?为什么要用指针的引用计数?
互斥锁是什么?用途是什么?条件变量又是什么?为什么要用条件变量?
如何在c++中创建线程?如何在线程间同步?
简述一下啊虚函数、虚表的原理?
std::unorded_map和std::map之间的差异是什么?
什么是完美转发?用途是什么?
什么是万能引用?用途是什么?
函数对象应该通过什么传递?
传递引用和传递值的区别?传递常引用和传递引用之间的区别?传递右值引用和传递引用之间的区别?
如何利用谓词对给定容器进行自定义排序?
C++函数指针有哪几类?函数指针、lambda、仿函数对象分别是什么?
请问traits是什么?什么时候用traits?
简述一下unordered set和set区别
n阶卡尔曼滤波复杂度
无序map和有序map的查找复杂度
算法题在线测试,给出两种不同的解决TopK问题的思路,并给出性能差异主要是哪些部分造成的
构造函数和虚函数可以是同一个吗?
vector的pop_back()了解吗?使用时是否会改变容器的容量?
C++析构函数能否为虚函数,为什么
C++内存模型是什么?
说一下static的作用
简述一下多态
简述同步通讯、异步通讯的区别及原理
申请一个所指内容不可修改的字符指针
申请一个指针不可修改的字符指针
类的const成员函数有什么作用?
类的const成员变量怎么初始化?
以下为32位C 程序,计算sizeof的结果 #pragma pack(push, 2) struct S { int i; char c; short s; }; #pragma pack(pop) void func(char e[10]) { printf("e:%d ", sizeof(e)); } int main() { int a = 10; int* b = &a; char c[10]; char* d = c; printf("a:%d, b:%d, c:%d, d:%d ", sizeof(a), sizeof(b), sizeof(c), sizeof(d)); func(c); printf("s:%d\n", sizeof(S)); return 0; }
f1(); pA->f2(); pA=&c; pA->f2(); pA->f2(); printf("\n"); return 0;}" data-toggle="tooltip" data-placement="top" title="虚函数与继承class A{ public: virtual void f1() { printf("A"); } virtual void f2() { f1(); }};class B : public A{ public: void f1() { printf("B"); } void f2() { f1(); }};class C : public A{ public: void f1() { printf("C"); }};int main(){ class A a; class B b; class C c; a.f2(); b.f2(); c.f2();printf(" "); a=b; a.f1(); a.f2(); a=c; a.f1(); a.f2(); printf(" "); class A* pA=NULL; pA=&b; pA->f1(); pA->f2(); pA=&c; pA->f2(); pA->f2(); printf("\n"); return 0;}" >虚函数与继承 class A { public: virtual void f1() { printf("A"); } virtual void f2() { f1(); } }; class B : public A { public: void f1() { printf("B"); } void f2() { f1(); } }; class C : public A { public: void f1() { printf("C"); } }; int main() { class A a; class B b; class C c; a.f2(); b.f2(); c.f2(); printf(" "); a=b; a.f1(); a.f2(); a=c; a.f1(); a.f2(); printf(" "); class A* pA=NULL; pA=&b; pA->f1(); pA->f2(); pA=&c; pA->f2(); pA->f2(); printf("\n"); return 0; }
关于宏定义和内联函数 #define FUNC(a, b) a*b inline int func(const int a, const int b) { return a*b; } int main() { const int a = 4; const int b = 2; const int c = func(a/b, b/a); const int d = FUNC(a/b, b/a); const int e = func(a+b, a-b); const int f = FUNC(a+b, a-b); printf("c:%d, d:%d, e:%d, f:%d\n", c, d, e, f); return 0; }
简述智能指针的优点是什么?
列举进程之间通信方式有哪些
define和const在编译的时候的差别
vector和list的区别
vector 中 resize 和 reserve 的区别
C++引用和指针有什么区别?
简单介绍一下智能指针
虚函数和纯虚函数的区别
谈谈你对协方差矩阵的认识?
判断两个矩形是否有重叠
请简述特征值和特征向量的一种物理意义
左值和右值的区别
简述一下malloc/free 和 new/delete的区别是什么?
如何存储稀疏矩阵?
描述一下 KD Tree 的构建及搜索步骤
简述一下牛顿法和高斯牛顿法区别
简述一下高斯牛顿法
简述一下虚函数
函数指针和指针函数有什么区别?使用过哪些STL容器?单例模式是什么,如何实现?
如何避免内存泄露?用过哪些智能指针?智能指针实现原理是怎样的?
简述一下虚函数和重载的区别
vector的resize和reserve区别
C++的数据结构 vector list的使用和区别
KDTree原理
static关键字的作用?为什么类的静态成员函数不能访问非静态成员变量?
可以用malloc给一个类对象分配内存吗?
构造函数可以是虚函数吗?析构函数为什么建议是虚函数?
虚函数的作用及底层实现原理?
在C语言中,是面向什么的编程方式,在C++语言中,有几种编程方式?
举出除了KdTree以外的近邻计算方法(栅格、B树、R树、四叉、八叉树等)。
怎么对KdTree进行Search By Range和Search By KNN操作?
怎么对KdTree进行插入操作?怎么确定一个节点的分类面?
请简述最近邻问题有哪几种典型解法?
简述一下快速排序原理
智能指针的作用是什么
C++的构造函数可以是虚函数吗?析构函数可以是虚函数吗?
有序二维数组(每行每列都有序)中判断某一个数是否存在
简述一下多态的实现原理
已知面外一点和面内三点,求点到面的距离
sqrt(2) 求解
简述一下虚函数含义
std::string类型为啥不能memset
写一个Vec2d类,支持 加 减 数乘 数除等操作
类的拷贝构造函数和赋值构造函数写法
简述const的用法
找四边形边界[C++编程]
数学,AX=b,求解
编程题:二叉树中两个节点的最近公共祖先节点
算法题:怎么求二叉树的宽度
请写一个计算器,输入字符串,输出对应的结果
C++中static静态变量有什么作用,在什么情况下会用
C++中智能指针相比普通指针的优势和劣势?
多线程和线程锁用过吗,怎么用,有什么作用
类中的this指针指向哪里
c++多线程中进程间通信的手段有哪些?
写代码解一元二次方程
讲一下const static
简述一下const的作用?
虚函数有什么作用,析构函数为什么定义为虚函数?
在C++语言中,引用和指针在功能和使用,相同点和不同点是什么?
在C++语言中,使用的智能指针,有哪几种?
如何快排代码复现
在自动驾驶的任务中,采用了哪些matlab的工具?
你看中公司的什么?或者公司的那些方面最吸引你
谈谈你对跳槽的看法;
你认为求职,穿什么去面试合适?
你说一下对**专业内容的了解,对此专业应用领域的了解?
关于你的个人隐私(是否有男/女朋友,或是否结婚)
请谈谈你个人的最大特色。
你最大的长处和弱点分别是什么?这些长处和弱点对你在企业的业绩会有什么样的影响?
你为什么觉得自己能够在这个职位上取得成就?
怎样与上级沟通?
面试进行时,大脑出现短路怎么办?
如果你是公司老板,最不喜欢的是哪种员工?
为什么下水道的井盖是圆的?
怎样理解团队?请举例并说明启示。
你争取成功的动力是什么?
在你参加我们这次面试前,你做了哪些准备工作?
找这份工作,你最重要的考虑因素为何?
上班的时候,往往有多件事需要你处理,你会如何安排?
你认为这份工作最重要的是什么?
直接领导要求你在30日内完成一项工作,你会怎样去完成?
物质待遇和工作条件是人们选择工作的重要因素之一,这次报考谈一谈你在选择工作时都考虑哪些因素?为什么?
当前对有些单位实施的‘末位淘汰制’,有不同争议,你怎么看待这种用人措施?”
假设你手头上有好几项工作没有完成,可是上级又给你安排了一项任务。你感到自己完成这项工作有困难。你如何处理这个矛盾?
针对你们单位业务工作中出现的问题,你提出了一些很好的建议,得到了同事们的赞同,但你的领导并不满意。在这种情况下,你怎么办?
假如在一次学习讨论会上,领导对你的发言很不满意,并当场批评了你,你怎么办?
如果你有一位固执武断的领导,你会经常提合理化建议吗?
请告知你的工作观?
你最喜欢的一本书是那本?
如果你遇到了挫折你将怎么办?
假如领导派你和一个有矛盾的同志一起出差,你如何处理?在日常生活中,出现这样的事情你是如何处理的?试举例说明。
你性格过于内向,这恐怕与我们的职业不合适?
你经历太单纯,而我们需要的是社会经验丰富的人?
你并非毕业于名牌院校?
除了本公司外,还应聘了哪些公司?
最能概括你自己的三个词是什么?
有想过创业吗?
在工作中学习到了些什么?
请谈谈如何适应办公室工作的新环境?
你认为你在学校属于好学生吗?
为什么选择我们这家公司?
为什么选择这个职务?
对这个职务的期许?
为什么我们要在众多的面试者中选择你?
如何安排自己的时间?会不会排斥加班?
谈谈你过去的工作经验中,最令你挫折的事情
谈谈你过去做过的成功案例
你做过的哪件事最令自己感到骄傲?
如果通过这次面试我们单位录用了你,但工作一段时间却发现你根本不适合这个职位,你怎么办?
假如你晚上要去送一个出国的同学去机场,可单位临时有事非你办不可,你怎么办?
如果你在这次面试中没有被录用,你怎么打算?
为了做好你工作份外之事,你该怎样获得他人的支持和帮助?
“你工作经验欠缺,如何能胜任这项工作?”
您在前一家公司的离职原因是什么?”
“你工作经验欠缺,如何能胜任这项工作?”
与上级意见不一是,你将怎么办?
在完成某项工作时,你认为领导要求的方式不是最好的,自己还有更好的方法,你应该怎么做?
“你希望与什么样的上级共事?”
如果我录用你,你将怎样开展工作?”
对这项工作,你有哪些可预见的困难?
你新到一个部门,一天一个客户来找你解决问题,你努力想让他满意,可是始终达不到群众得满意,他投诉你们部门工作效率低,你这个时候怎么作?
你做过的哪件事最令自己感到骄傲?
你和别人发生过争执吗?你是怎样解决的?
你为什么愿意到我们公司来工作?
眼下你生活中最重要的是什么?
什么会让你有成就感?
你怎样对待自己的失敗?
你通常如何处理別人的批评?
你欣赏哪种性格的人?
就你申请的这个职位,你认为你还欠缺什么?
说说你的家庭。
对工作的期望与目标何在?
说说你对行业、技术发展趋势的看法?
为什么要离职?
喜欢这份工作的哪一点?
你怎么理解你应聘的职位?
作为被面试者给我打一下分
你的业余爱好是什么?
最能概括你自己的三个词是什么?
你能为我们公司带来什么呢?
你最擅长的技术方向是什么?
请说出你选择这份工作的动机?
你对于我们公司了解多少?
你最近是否参加了培训课程?谈谈培训课程的内容。是公司资助还是自费参加?
假设你在某单位工作,成绩比较突出,得到领导的肯定。但同时你发现同事们越来越孤立你,你怎么看这个问题?你准备怎么办?
工作中你难以和同事、上司相处,你该怎么办?
如果你做的一项工作受到上级领导的表扬,但你主管领导却说是他做的,你该怎样?
如果你在这次考试中没有被录用,你怎么打算?
如果你的工作出现失误,给本公司造成经济损失,你认为该怎么办?
在完成某项工作时,你认为领导要求的方式不是最好的,自己还有更好的方法,你应该怎么做?
如果通过这次面试我们单位录用了你,但工作一段时间却发现你根本不适合这个职位,你怎么办?
你还有什么问题要问吗?
你朋友对你的评价?
在五年的时间内,你的职业规划?
你对薪资的要求?
你对加班的看法?
说说你最大的缺点?
你觉得你个性上最大的优点是什么?
请你自我介绍一下
数理统计:解释一下假设检验。
机器学习:解释一下逻辑回归和随机森林。
分别给出SQL去重和聚合的代码。
电商数据分析问题,背景如下:
某电商网站在2019年一年的运营中,用户订单的具体数据。现在需要对用户的购物习惯、平台总体运营情况等进行分析,并提出一些有效建议。
用逻辑回归制作评分卡
背景:在银行借贷场景中,评分卡是一种以分数形式来衡量一个客户的信用风险大小的手段,它衡量向别人借钱的人不能如期履行合同中的还本付息责任,并让借钱给别人的人造成经济损失的可能性。
数据主要标签:出现90天及以上逾期行为、年龄、月收入、家庭人数、抵押贷款数量、过去两年内出现90天逾期或更坏的次数、过去两年内出现60~89天逾期的次数等。
在自动驾驶中,如何充分利用获取的路测数据?
简述自动驾驶仿真中WorldSIM与LogiSim的概念。
求解f矩阵需要多少点对,如果存在多于四对点对,如何进行求解
p3p在什么时候会发生退化?
如何推导卡尔曼滤波的卡尔曼增益?
说一下你对贝尔曼方程的理解?
L1和L2是什么,有什么区别
假设你正在爬楼梯。需要 n 阶你才能到达楼顶。
每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢?
注意:给定 n 是一个正整数。
示例 1:
输入: 2
输出: 2
解释: 有两种方法可以爬到楼顶。
1 阶 + 1 阶
2 阶
示例 2:
输入: 3
输出: 3
解释: 有三种方法可以爬到楼顶。
1 阶 + 1 阶 + 1 阶
1 阶 + 2 阶
2 阶 + 1 阶
谈一谈你对智能驾驶的了解。
简述一下你对卡方检验的理解。
说出几种常见的传感器并说明其各自的优势和劣势。
在隧道场景下,可以选用什么组合的传感器融合方案?这其中我们可以使用点云地图吗?并说明你的理由。
讲一讲LVI-SAM中的IMU、Lidar与Camera是如何融合的?
简述VINS初始化的过程。
谈一谈在机器学习应用中,方差和偏差的关系。
仿真的真实性如何保证
在IMU预积分过程中,BIAS更新后是如何传递的?
采样/优化算法,有何区别?
如何提升底盘里程计的精度(假设编码器采样率不足,地面不平整)?
针对特种作业机器人中旋转和大曲率移动代价较高的问题,如何改进A*算法?
Linux查看环境变量的命令,查看进程占用资源的命令。
简述KL散度(相对熵)和交叉熵的区别。
Apollo中,参考线是如何获取的?并简述参考线的平滑算法。
请说出你对轮胎模型公式的了解。
在二维平面上给出一堆散点,要求通过ransac算法拟合直线,并给出代码。
IMU与GNSS信息融合的好处以及应用场景有哪些?
假设有轮速计、相机、Lidar、IMU、GNSS等传感器,请你设计一个导航系统的整体框架。
请你描述一下GNSS和INS初始化的流程以及需要顾及的参数有哪些?
说出几种多传感器(包括GNSS、IMU、相机、激光雷达等)融合定位的建模方法。
如何解决粒子滤波中由于重采样导致的粒子耗散问题?
在传感器标定过程中,如何最小化标定的误差并获得各个传感器之间的标定参数?
在自动驾驶中,地图是否有存在的意义?在地图构建过程中,回环检测是否必要?并简述原因。
对比DBSCAN聚类算法与其他聚类算法的优劣。
请介绍求解FPFH特征描述子的计算过程。
请说出几个应用在自动驾驶决策规划中常见的几种非线性优化方法。
ransac拟合直线手写
谈谈自己对固态激光雷达的了解。
基于特征提取,在解决地库场景的时候,特征点较少且相似点云较多,如何解决?
简述旋转矩阵的几种描述方式并说明它们分别解决了什么问题。
点,球,线段,直线,圆柱,平面各有几个自由度。
简述GPS双天线安装偏角的标定方法。
你曾经用过哪些传统的点云处理方法 ?
ICP配准算法的英文/中文全称是什么?
请简述高斯牛顿迭代法(Gauss-Newton iteration method)。
自动驾驶系统的组成是什么?
最基本的组合导航一般包括GPS(全球定位系统)和IMU(惯性传感器)。GPS测量精度高,但是数据更新频率低;而IMU数据更新频率很高,但是测量误差会随着时间累积。请问如何处理两个传感器数据更新频率不同的问题并加两者数据进行融合?
航位推算(Dead Reckoning)的基本原理是什么?并简单概述其基本流程。
在组合导航系统中,卡尔曼滤波法是如何对噪声参数调优的?
TCP和UDP通讯的区别
嵌入式方面,DRAM和SRAM的区别,速度差多少?
程序如何加载到内存中?
简述pid调参方法
Promethues平台是否适用于树莓派,为什么?
有哪些实际的机器人控制算法项目,简要谈一谈
在ROS下怎么调试?
描述一下ros中gazbeo仿真和它的作用
双环PID如何设置参数
ros的通信机制有哪些
是否用过ros1或2
简单谈一谈pid 控制算法的设计和调参思路
roslaunch和rosrun的区别?
简单说下arm处理器r0-r15 寄存器的作用
ROS中rosrun和roslaunch的区别是什么?
PID调试方法。
ROS通信机制有哪些
ros1与ros2有什么区别?
给定二维数组代表海域和岛屿,计算有多少个孤岛
强化学习reward shaping具体如何实现
CarSim和Simulink怎么联仿
状态空间方程的控制方法的整个控制流程是怎么样的?
MPC算法对大延迟系统的控制如何进行优化
讲一讲LQR和MPC的不同点,以及相应的应用场景。
在二维平面中, 1)点(1,0)绕原点逆时针旋转30度后再朝(1,0)方向平移1之后的位置是?能否应矩阵乘法表示? 2)点(1,0)朝(1,0)方向平移1之后再绕原点逆时针旋转30度的位置是?能否用矩阵乘法表示?
一个物体初始速度、加速度为0,以最大加加速度(Jmax)往前运动了S,请问在S这个位置,该物体的速度、加速度分别是多少?耗时多久?
请用最小二乘法解决以下问题: 1)已知点集P0(x0,y0),P1(x1,y1),…,Pn(xn,yn),请拟合直线y=ax+b,在什么情况下一定会拟合失败? 2)已知点集P0(x0,y0,z0),P1(x1,y1,z1),…,Pn(xn,yn,zn),请拟合平面Ax+By+Cz=0(ABC不同时为0)
对于一三维参数曲线p=f(u),已知df/du,d2f/du2,d3f/du3,求参数曲线p对距离S的一至三阶导
工业机器人坐标系的可规划范围是怎么计算的
画出一个你最熟悉的伺服控制系统框图,并描述 1.在该系统中通常存在哪些导致误差的因素; 2.针对这些因素,常见的补偿方法或抑制方法有哪些?
解释一下阻抗控制的原理
说说LQR横向控制时的流程和细节,然后结合回答问细节
设计模式有哪些类型
LQR怎么处理非线性目标和约束
LQR和MPC的区别
H∞和传统控制的区别
激活集法,内点法和SQP方法的区别是什么?
QP的主流求解器有哪些
EM的流程,QP问题的cost和约束条件
给定一套多传感器融合设备包含gnss,IMU以及雷达和相机,如何使用他们进行融合?然后相机和雷达的在里面融合有必要吗?如果在玻璃阳光照射的环境下去处理定位?
如何合理选择Piecewise_Jerk算法的bound
描述MPC算法原理是什么
简述MPC使用的模型是?(列举N个)
如何对一个双质量系统进行时域和频域分析
给定一个传递函数,如何转化成状态空间表达式
最小二乘法在实际应用中会有什么问题
用过OSQP吗?具体原理知道吗?哪些情况会导致算法提前结束?
TX2和机载NX有什么应用场景,有什么区别
MPC和LQR用过吗?和PID相比优缺点是怎么样的
在路径规划的应用中,哪些场景中会应用到混合A*算法
对于实际道路上动态障碍物较多的场景,可以采用什么算法进行路径规划?
Lattice如何实现动态避障
描述TEB算法和DWA算法的原理
介绍一下优化算法的目标函数,为什么要min jerk
怎么保障机器人运动的平稳体验
你过往的项目经历中遇到过哪些技术方面的难点,说一说你是如何解决的
会针对论文提问,主要问有解决了什么问题,哪些创新点,实验如何做的,数据如何获取
RRT和RRT*的区别
A*和RRT的区别
A*和混合A*的区别
轨迹插值的中间点如何保证可行
轨迹优化方法有哪些
介绍一下Hybrid A*原理,以及和A*、Lattice采样等算法的区别
你用过的路径规划算法原理及特点
速度障碍法是否适用于全局路径规划
如何让RRT算法输出路径符合机器人运动学
常见路径规划算法以及细节
基于图论的规划方法其缺点是什么?
讲一下A*算法的原理
常用的局部路径规划方法都有哪些?能否讲一个你熟悉的方法?
常用的全局路径规划方法都有哪些?能否讲一下astar算法的工作流程?
解释TEB算法
解释一下RRT*
解释Hybrid A*算法
简述MPC开发过程
协方差的定义是什么?有什么作用?
常用的控制方法都有哪些,能否举例说明?例如pid或者lqr方法
机器人常用的决策方法你熟悉吗?例如决策树或者状态机或者行为树,能否举例说明一下?
如何建立车辆动力学模型?
机器人方向的介绍,运动学,动力学。比如正运动学的 HD table,以及怎么键坐标系。
车辆是如何进行执行横向或者纵向控制的,如何匹配使得车辆跟踪上目标点?
新能源中的三电指的是什么?
QP一定是凸问题吗?
讲一讲自动驾驶中的一些坐标系以及转换关系
写一个角度归一化的函数,归一化到[-PI,PI]
线控转向系统的控制延迟如何处理
在非线性规划问题中,KKT条件有哪些?
LQR和MPC的区别,MPC的实现原理。
Ipopt求解器如何使用
Lattice planner中的代价函数的作用是什么?
启发搜索算法中启发式函数有哪些构建方法?如何设计对应的代价函数
编程题:一个机器人位于一个m*n网格的左上角,机器人每次只能向下或者向右移动一步,机器人试图到达网格的右下角,请问有多少种不同的路径
介绍下RRT和RRT*算法,如何进行碰撞检测的,生成的轨迹不满足车辆动力学约束怎么办
轨迹优化是否需要初始解,作用是什么?
A*算法中openlist和closelist的作用,节点如何更新?
蚁群算法和常见的搜索算法有什么不一样。
hybrid A*算法的原理是什么?和A*算法相比有哪些改进或者优化?
局部路径规划与全局路径规划本质区别是什么?
a*和Dijkstra算法本质区别是什么?
a*算法在自动驾驶汽车的路径规划中有什么局限?有哪些解决的办法?
TEB的算法流程
请写出a*算法的伪代码
手绘对极约束并推导公式
如何根据IMU的bias的变化量求IMU预积分的变化量?
惯导误差模型是怎么来的?比如15维的卡尔曼滤波模型。
如何理解视觉重投影误差?
最小二乘,请补充x的求解过程。
讲一下卡尔曼滤波算法的主要公式及各参数代表的意义
如何解决匹配点的筛选问题
LM算法的流程,以及与高斯牛顿的区别
解释单目VIO的初始化过程。需要估计哪些量?重力方向和尺度如何估计?
说明PnP问题的解法。
解释重投影模型和BA的原理。
说明预积分的图优化模型。
预积分的测量模型和噪声模型是什么?预积分对零偏是怎么处理的?为什么要这样处理?
你认为ORB-SLAM3和VINS-Fusion的几个不同点?
简述卡尔曼滤波
Vins mono的初始化和orb slam3的初始化有啥区别
下面哪种算子可以作为边缘检测中的 Laplace 算子( )
A. 1 0 -1 2 0 -2 1 0 -1
B. 0 1 0 1 -4 1 0 1 0
C. 1 1 1 0 0 0 -1 -1 -1
D. 0 -1 1 0
可以直接使用九轴 MEMS IMU“准确”估计( )
A. 加速计和陀螺仪 bias
B. 重力方向
C. IMU 在世界系中姿态
D. IMU 在世界系中位置
10 个相机同时看到 100 个路标点,请问此时 BA 优化中 Hessian 矩阵的维度可能是( )
A. 60*60
B. 154*154
C. 160*160
D. 360*360
三维直线的最小参数化表示的维度是( )
A. 3 B. 4 C. 5 D. 6
对于两个相机 C1、C2,C1 观测到 n(n>8)个特征点{p},且已知 n 个特征点在世界坐标系下的 3D 位 置,要想求解 C1、C2 的相对位姿,那么 C2 至少要与 C1 有多少个共视点( )
A. 3
B. 4
C. 5
D. 8
以下关于开源 SLAM 系统的描述,错误的有( )
A. ORB-SLAM 的后端使用滤波方案估计相机位姿
B. DSO 中使用描述子匹配图像间的共视点
C. MSCKF 维护的状态量包括 IMU 状态、相机位姿和路标等
D. VINS MONO 需要离线标定相机-IMU 外参
下面哪些不是 SLAM 常用数据集( )
A. COCO B. EuRoC C. KITTI D. TUM
李代数 se(3) 的维数是( )
A. 3 B. 4 C. 5 D. 6
计算E,H过程中normalize的作用
E、F、H的自由度,为什么?
介绍一下LM算法
请简要介绍一下VINS-Mono预积分的过程。
粒子滤波器设计时,重采样的作用及如何实现;
请对机器人状态优化中,KF,EKF,UKF进行对比。
IMU相对车体安装角度误差如何标定。
写一下针孔相机透视投影模型,及视觉重投影误差对相机位姿和特征点位置的雅可比
在滑动窗口中通过什么方式去移除老的变量,需要注意什么?
如何应对GNSS缓慢漂移的问题。
都有哪些方法可以表达一个三维空间中的旋转,分别有什么优劣?
地图定位匹配时的残差函数是什么
对标定正确的双目针孔相机系统应当能够观察到什么样的现象?
世界坐标系下的三维点投影到相机坐标系过程是怎么样的?
在GN优化中的协方差或者信息矩阵作用是什么?
请详细阐述DBow词袋构建与匹配原理。
简述PNP的解法。
讲解一下经典卡尔曼滤波器。
推导旋转矩阵求导过程。
请写出L-M(Levenberg-Marquard)算法的流程并指出其相对于GN优化算法的优缺点。
以下哪些手段可以提升重复纹理环境的定位感知能力? 调整SGBM的参数,增大平滑项的权重 VO后端增加robust norm,降低feature误匹配带来的误差 对原图进行高斯滤波,降低重复纹理的梯度 对depth增加时域的滤波,降低depth误匹配的影响
【判断题】SLAM中使用逆深度具有更好的数值稳定性,可以近似为高斯分布。
【判断题】L1正则化可以产生稀疏权值,并具有特征选择作用。
【判断题】已知激光雷达和图像传感器之间的旋转和平移即可,可以把一个激光雷达提 供的3维测量点投影到图像中。
【判断题】卷积神经网络中,池化层的存在保证了非线性。
【判断题】对于分辨率相同的栅格地图,在深度观测相同的情况下,占用概率更新算法要操作的栅格数目通常远大于TSDF更新算法。
【判断题】任意一个旋转矩阵的转置乘以这个旋转矩阵自身,积都会是单位阵。
【判断题】四元数q1 = (w, x y, z)与四元数q2 = (-w, -x,-y, -z)表示的是绕同一个轴的两个反方向的旋转。
【判断题】四元数q1 = (w, x y, z)与四元数q2 = (-w, -x,-y, -z)表示的是绕同一个轴的两个反方向的旋转。
IMU测量模型是怎样的
ORB-SLAM3和VINS的初始化有何不一样?
特征点匹配中,如何避免误匹配?
如何剔除动态物体点云?
滑动窗口是如何进行边缘化操作的?
优化位姿时如何确定求的Jacobian矩阵是否正确?
高斯牛顿法当观测小于自变量是会出现哪些问题
如何将200hz的IMU,10hz的相机,1hz的GPS融合
无法组网的情况下怎么多机协同
复杂环境下机器人的鲁棒定位怎么实现
简述PnP是什么 ,怎么做
边缘化怎么做,为啥边缘化要恢复Jacobian
简述预积分和积分的区别
为啥要用滑窗
如何用pca判断点云的特征属性,线特征或面特征或不规则?
激光点云动态点怎么去除,有哪些思路
如何求解线性方程Ax=b?SVD和QR分解哪个更快?
说一下你最熟悉的一个开源SLAM的框架和流程。
简述激光SLAM如何抑制高度误差
动态场景下定位与建图有可能会发生哪些问题并给出解决办法(开放性问题)
手撸高斯牛顿求解曲线拟合
大概描述一下IMU预计分的过程
简述IMU和激光的量纲怎么统一
最小二乘协方差矩阵怎么来的
简述两种设计模式
匹配是怎么做的,怎么求位姿变换
特征点是怎么提取的,地面点是怎么提取的,怎么进行平面拟合,怎么求平面法向量
机器人由室外定位过度到室内定位中,有哪些可用的方案。数据的可信度如何?
简述一下相机事件的基本原理
简述RANSAC由三维点云拟合平面的过程
简述欧拉积分,中值积分,RK4积分过程
Cholesky和SVD分解的原理是什么?
旋转的左扰动和右扰动能推到吗?
简述一下光流法跟踪的原理是?
快速梯度下降、GN、LM和DogLeg等各个算法有什么区别?
动态场景下定位与建图有可能会发生哪些问题并给出解决办法(开放性问题)
大概描述一下IMU预积分的过程
手撸高斯牛顿求解曲线拟合
VINS中对旋转的更新是如何操作的
说两个算法的原理及公式
简述各种传感器(例如IMU,里程计,激光雷达,相机等)的功能和参数指标。
请简述一个你了解的开源SLAM算法
请简述使用 RANSAC 由三维点云拟合平面的过程(包括其中使用的数学方法和公式)。
简述欧拉积分、中值积分和RK4积分的过程
求解线性方程组Ax=b的方法有哪些?
简述一种贝叶斯滤波过程(如卡尔曼滤波)
贝叶斯公式是什么?
SLAM中的IMU状态量一般包括什么?
光流法的基本假设是什么?
矩阵求逆的方法有哪些?
简述BA过程及其求解方法
最小二乘问题有哪些求解方法?并比较不同解法的效率稳定性。
相机内参的含义是什么?如果在不改变外参的情况下,图片放大两倍,内参会发生怎样的变化?
初始化过程对相机运动有哪些要求?
简述你对线特征的理解
口述ORB特征点的提取过程
VIO系统具有几个纬度的不可观,以及为什么
激光雷达slam中对于动态物体,如旁边的车辆和行人,会影响点云的配准,该怎样处理才能尽可能小的降低其影响呢
高斯滤波的基本原理是什么?应该如何使用高斯滤波?
LOAM最原始版本特征提取、点云匹配原理
讲讲对扩展卡尔曼滤波的理解
卡尔曼滤波中对状态的预测更新(t时刻状态>t+1时刻状态)过程,用贝叶斯概率表达,是在对t和t+1时刻的联合状态随机分布进行边缘概率
关于SL AM中ICP算法以下说法,明显错误的是?
a、ICP算法比较依赖初值
b、是一一种全局最优解算法
c、有多种距离度量
d、是基于最小乘法的最优匹配
描述卡尔曼滤波(Kalman FIlter)的工作原理,并介绍自己曾经用Kalman Filter做状态估计的场景和遇到的困难?
ORBSLAM初始化,为何存在尺度不确定性
VINS-MONO算法中有边缘化的操作,但是ORB-SLAM中没有边缘化的操作。ORB-SLAM算法是怎样不做边缘化操作来达到VINS-MONO的效果?
阐述ESKF的计算流程,相比EKF,它有哪些优势?
你有哪些调试卡尔曼滤波器的心得体会?并在调试时遇到了哪些困难?以及你是如何解决的?
基于滤波的方法和基于优化的方法有哪些区别?优化方法的优点是什么?
ORBSLAM中LocalBA时固定了哪些量
简述卡尔曼滤波的万向锁
单目VIO算法初始化的原因是什么?初始化的方法有哪些?
如何使用自己的传感器运行LIO-SAM算法?
阐述VINS算法初始化的流程
阐述任意一个熟知的SLAM算法的实现原理。
如何解决动态环境下给SLAM算法带来的问题?
视觉SLAM的框架以及算法中各个模块的作用分别是什么?
谈谈你对视觉SLAM,单目测距和多目测距的理解。
如何使用VSLAM算法应对光照变化明显的场景?
谈谈你对机器人探索建图方法的理解
你认为Cartographer算法后端部分还有哪些可以优化的地方?
针对SLAM算法的各个阶段,谈谈使用哪些方法可以提升算法的运行速度?
在机器人纯定位阶段,如果实际地图与加载地图有较大差异,此时应如何处理?
阐述你对LIO-SAM算法的认识
| 说出几个常见的SLAM算法框架 |
简述SLAM技术发展历程,并谈谈今后SLAM算法的相关发展方向。
手写特征的提取匹配的源码
简述局部地图和滑动窗口的区别
| 简述LOAM算法流程细节 |
SLAM算法后端部分采用滤波或者优化方法各有什么优缺点?
| LIO-SAM的框架优点是什么? |
Vins算法中时间戳是如何对齐的?
ORBSLAM2和VINS-MONO框架有哪些区别?
阐述你了解的开源SLAM项目有哪些?
cartographer中,如何对imu和里程计的数据进行调用,并发挥出各自传感器的作用。
粒子滤波的原理,采样点数和采样范围怎么确定的,初始化策略?
说明卡尔曼滤波,扩展卡尔曼滤波,粒子滤波的区别。
阐述你对扩展卡尔曼滤波(kf)的理解
简述动力学中的拉格朗日法和牛顿欧拉法大概是怎样实现的?
卡尔曼滤波器和状态观测器有哪些区别?
ORB-SLAM算法流程概括
| LIO-SAM的框架优点是什么? |
简述粒子滤波与卡尔曼滤波的优缺点
卡尔曼滤波的本质是什么?
简述VINS-Mono的初始化流程
阐述ORB-SLAM、VINS-Mono的缺点是什么?
对旋转的误差状态求导推导写出来
激光建图发生高度方向翘起的原因是什么?
简述BA优化方法
你在SLAM方面尝试过那些算法?评测这些SLAM算法的技术指标有那些?哪些算法尝试成功了,哪些算法尝试失败了
阐述你对ORB-SLAM2的理解
简述vio标定原理
GNSS的原始数据有哪些?
解释一下单应矩阵
简述一下两帧之间如何构建残差
一个没有成员变量,但有成员函数的类的size是多大?
简述推导特征法与直接法的损失函数
简述多相机实现周视系统的原理
PnP求解最少需要几个点?Essential矩阵的自由度是多少?
IMU的测量模型是什么?
求解线性方程组Ax=b的方法有哪些?并说出各自的优缺点(LU,QR,SVD等)
请简述图优化和最小二乘法之间的联系
简述逆深度的含义和作用
阐述你对预积分的理解
ORB-SLAM算法中,单目初始化可以使用H或E矩阵恢复运动,这两种矩阵分别用于什么情况?
你了解的点云配准算法有哪些?
如果相机模型发生变化,将所有像素的坐标放大两倍。相机内参会发生什么变化?
简述你对手眼标定原理的理解
ROS中pointcloud1消息和pointcloud2消息的区别是什么?
Ceres中的非线性优化求解步骤是什么?
单目视觉VO尺度为什么会漂移
阐述你对预积分的理解
阐述你对松耦合和紧耦合的理解
阐述你对PL-ICP算法的理解
阐述你对PnP算法的理解。
点到平面的最短距离公式是什么?
阐述激光雷达和相机之间的外参标定原理
Fast Lio算法中前向传播部分是如何传播协方差的?
NDT的残差怎么算,使用时哪些参数需要设置
如何使用Ceres加入残差的权重?并说出加入残差的原理和意义是什么?
牛顿法和高斯牛顿法的区别有哪些?
求解PnP位姿最少需要几个点?有几组解?误差来源于哪里?
基础矩阵的概念是什么?并说出几种求解基础矩阵的方法。
如何求解相机相对于世界坐标系中的任意一个三维点的位姿?
简述你对pnp算法原理的理解,该算法的适用场景是什么?
相机畸变的种类有哪些?
优化算法的核心是什么?你知道有哪些常用的优化算法?
滑窗时边缘化是怎样实现的?
滤波的方法和优化的方法有哪些区别?
简述预积分的优点
如何依靠激光点云和其他传感器数据还原3d场景和目标物体?
多目相机如何进行标定?
阐述ICP算法的原理,并说出PL-ICP算法有哪些改进?
你们相机是怎么标定的?有没有标定过鱼眼相机、RGBD相机?
回环检测是用什么方法实现的?
推导左扰动模型
根据相机的投影模型,推导从世界坐标系转换到像素平面坐标系的过程以及fx的计算公式。
在多传感器融合定位中,激光雷达与惯导IMU的外参标定方法,尝试过几种方法,那种方法标定成功过?
ICP至少需要几对点,已知对应点的话,怎么求变换关系闭式解
SO(3)和SE(3)的区别有哪些?并说出它们如何在算法中使用?
gtsam图优化中优化的整个流程是什么?
阐述QR分解,Chokesly分解,SVD分解的各自特点。
L-M牛顿法相比高斯牛顿法优势在哪里?
ORB-SLAM中卡方检验的作用是什么?
简述协方差的主要作用
H矩阵主要的应用场合是什么?
说出你知道的非线性优化方法,并说明它们之间的区别。
求出本质矩阵如何恢复R和t
旋转矩阵的特征值和特征向量分别是多少?
阐述H矩阵的使用场景
阐述ICP和NDT两种配准方法。
激光SLAM中回环检测的两种办法;
阐述牛顿法和LM算法的算法细节。
IMU预积分可以避免重复传播的原因是什么?
LEGO-LOAM中为什么要将地面点与非地面点划分开?
你知道哪些回环检测算法,描述一下
如果环境中有两个版本的OpenCV,如何在CMakeList.txt中指定使用某一版本的OpenCV
为什么要引入IMU预积分
谈谈你对滑动窗口的理解。
为什么单目VSLAM会有尺度漂移?如何解释这种尺度漂移?现实当中有没有解决办法?
预积分相比于传统积分的差异在哪里?
本质矩阵(Essential Matrix)有几个自由度?
介绍一下VINS的系统框架
IMU预积分与常规积分的区别是什么
由相机摄影中心到影像平面间的垂直距离,称为相机的 ;相机物镜系统的光学畸变差分为 和 。
随着IP网络的发展,为了节省可分配的注册IP地址,有一些地址被拿出来用于私有IP地址,以下不属于私有IP地址范围的是
A、10.6.207.84 B、172.23.30.28 C、172.32.50.80 D.192.168.1.100
针对有动态行人和车辆,有高架桥和涵洞,有高速公路的场景,提供一套多传感器融合的定位方案,详细描述传感器选择和融合定位方案?
某地为适应城市信息化管理的需要,利用车载移动测量系统(主要由POS系统和相机成像系统组成)采集了一个外业工程,获取了井盖、路灯等主要城市部件点的立体像对,试问如何通过POS数据和立体像对快速地获取各城市部件点的地理位置,请简要叙述具体方案及解算过程。
假设一个单线激光与一个相机刚性连接,试提供一种标定单线激光与相机外参的方法,并画出流程图。
简述BA的原理
3D空间的位姿如何表达?
简述三种不同的激光点云匹配算法?
SVD分解用在什么数学场景下,主要解决什么问题?
说说Fast特征和Harris特征的异同?
说说ORB-SLAM中ORB特征提取与OpenCV有何不同?
为什么需要边缘化?如何进行?边缘化的过程中会出现什么问题?
如何评价建图的精度
如何求解线性方程Ax=b?SVD和QR分解哪个更快?
滑动窗口中的边缘化过程
如何解决退化场景给位姿估计带来的挑战?
简述ICP的过程
描述子距离的匹配方法,除了暴力匹配还有什么?
单目视觉如何测量深度?
PNP求解最少需要几个点?只有一个点的自由度是多少?两个呢?
对于长廊问题,有什么好的解决方法?
IMU预积分了解么?为什么要进行预积分
激光雷达运动畸变是否了解,讲一讲?
当前帧和局部地图的数据关联是如何做的?
点到线点到面的icp怎么做的
ax=b求解怎么做的
NDT配准特点
推导高斯牛顿公式,说明梯度下降法,高斯牛顿法,LM法的区别
为什么SVD 分解的V矩阵的最后一列 是Ax=0的解
pnp最少需要几个点
基础矩阵的求解方式 自由度 为什么是这样的自由度
对边缘化的理解?
H矩阵的边缘化,很多细节
简述VINS-mono初始化流程
LOAM后端中特征点是怎么匹配的?
卡尔曼滤波状态预测的协方差矩阵怎么算
请简述卡尔曼滤波的流程及增益K的含义,运动方程中预测噪声是变大还是变小,观测方程中噪声是变大还是变小?噪声是如何调参的?
说明UKF、EKF和PF之间的关系
VINS-MONO的边缘化过程用概率模型怎么描述
Loam建图时,地图在高度上常出现累积误差的原因是什么。
从一堆三维点中高效提取平面的方法
阐述VINS算法初始化的流程
ORBSLAM2与VINS的区别?
VINS前端流程?
ESKF和EKF主要的区别是什么
卡尔曼滤波与扩展卡尔曼滤波的区别
EKF,UKF各自的优缺点?
EKF、ESKF和UKF的区别和联系
描述特征点法和直接法的优缺点
说一下基础矩阵和本质矩阵的区别
对于一个扰动左乘和右乘是相同的吗?为什么
SLAM滤波算法和优化算法的区别
EKF和BA
Loam为什么选择线特征和面特征
LeGO-LOAM怎么判断找到的最近5个点是不是线特征
MSCKF中SLAM特征与MSCKF特征的区别
什么是紧耦合、松耦合?优缺点。
简述如何在SLAM框架基础上添加语义分割网络
纯旋转的图像帧可以实现ORB-SLAM的初始化吗?
对于光照明暗变化,动态场景,视觉SLAM如何去解决?
为什么SLAM中常用L-M方法?
ORB-SLAM怎么克服尺度漂移问题?回环原理讲一下,要估计哪些量?
ORB-SLAM的哪个部分最耗时?后端H矩阵求解的算法复杂度是多少?如何去加速后端求解?
SLAM后端不收敛怎么办
简述ORB-SLAM的回环流程
ORB与VINS的区别?
描述一下ORB-SLAM的初始化步骤?
简述通用的视觉SLAM框架有哪些?
在ORB-SLAM回环中,更新的数据在哪个环节起到哪些作用?
简述自己熟悉的SLAM算法,雷达和视觉SLAM分析其优缺点。
SLAM中的绑架问题是什么?
SLAM中为什么要引入李群李代数?
请简述cartographer中分支定界的原理
你熟悉哪些激光SLAM建图方案,举例说明。
LOAM于LeGO-LOAM的区别;
简述一下LOAM和LeGO-LOAM的相同点和不同点。LeGO-LOAM相比于LOAM做出了哪些改进?
ORB-SLAM2的如何实现的整个流程,说说他的初始化
ORB-SLAM中的B是什么?ORB和FAST的区别
物体级SLAM有CodeSLAM,CubeSLAM ,QuadricSLAM
SLAM算法中单目估计相机位姿时通常需要PnP给出相机初始位姿
简述一下orb-slam3它的大致框架
特征点法SLAM中,如何增强特征描述子之间的区分度?
简述ORB_SLAM2它的几个模块的作用
ORBSLAM单目初始化与双目初始化的区别
SLAM技术领域中,SFM主要有几种方式,对比优缺点,当下主要用其中的那种形式?
在激光SLAM中,常用多线激光雷达类定位和建图,目前市面上有机械旋转式雷达和固态激光雷达。相比之下,哪一种方式定位效果好,哪一种建图效果好?
单目slam和双目slam的区别
ORBSLAM为了特征点均匀化做了哪些处理
ORBSLAM的位姿图优化是怎么建立的
简要说明感知模块的处理流程,如预处理、模型处理以及后处理分别做了什么?
单链表之首尾相连,成对输出问题。
例子:
输入:1一>2一>3一>4一>5一>6一>7
输出:1一>7一>2一>6一>3一>5一>4
要求:空间复杂度为O(1),即不可借助其他容器。
思路:找到中间的节点将中间以后的节点链接到新的链表头下,反转。然后以头插的形式插入到前半部分的链表中。
在VIO中遇到前端特征点匹配有错误,可以怎么解决?
基于优化的SLAM方法中信息矩阵相当于基于卡尔曼滤波的SLAM方法中的哪一个概念?
请列举pytorch中batch normalization的主要参数,并介绍在训练和测试时的区别。
以下哪个不是视觉定位中常用的相机参数( )
A. 相机焦距
B. 图像畸变
C. Optical Center
D. 镜头 FOV
针对有动态障碍物、高架桥、涵洞等多种场景,试提供一套多传感器融合的定位方案,并详细描述传感器的选择和融合方案。
3A具体指的是哪几件事?常用的测光方法有哪些?
简述一下张正友标定方法?深度相机的红外相机是怎么标定的?
多传感器融合slam不同传感器融合的权重如何设置?
你了解哪些点云和相机融合检测的方式,请详细介绍。
手写ransac
描述外参初始化ransac的过程。
车上多个摄像头图像投影到2D平面如何实现?
假设一个多线激光雷达与相机刚性链接,试提供一种激光雷达与相机的外参标定方法。
请对比几种激光配准算法(ICP,NDT,PL-ICP,CSM-cartographer)的优缺点
请介绍相机内参矩阵每个参数的含义。
简要介绍VINS-Mono中的边缘化
讲一下对于误差状态卡尔曼的理解,以及它在gnss/ins组合导航中是怎么用的。
在基于滑窗的融合算法中,边缘化的目的是什么?
你怎么看多传感器中的前融合和中融合?
简要描述ICP和NDT的原理
描述RANSAC原理
简要说明Lidar,IMU,GPS,Odom等多传感器的时间同步
多传感器之间是怎么对时的?
介绍SVD分解及应用
分别介绍LM算法与梯度下降法,高斯牛顿法,以及各自的优缺点。
介绍LM算法
简要说明ORB是如何实现旋转和尺度不变性的。
简要说明ORB的描述子。
说说SIFT,SURF和ORB的各自特点。
简要说明ORB特征点的提取过程。
简述RANSAC 原理。
简述RANSAC求基础矩阵的过程。
简述RANSAC原理及其优缺点。
如何用常规的开源深度强化学习框架训练移动机器人导航策略
用深度强化学习训练导航策略的挑战是什么
强化学习,问 MDP 的基本假设,问 DQN概念及如何实现
强化学习属于监督学习还是无监督学习,为什么
有哪些方法可以使强化学习的训练更稳定
强化学习中Off-policy和On-policy的区别和优缺点
讲一下你在强化学习训练过程中遇到的问题,怎么解决的?
解释Q-Learning和SARSA的区别?
阐述一下强化学习中TD和MC的区别和优缺点
卷积神经网络和普通神经网络有什么区别,优势在哪
池化的数学意义是什么
求卷积层的输出
写一下BN的公式,以及BN的作用
说一下1x1 的卷积有什么用
用tensorflow, paddle 做过几个项目的开发
yolov3中的锚框大小怎么得到的,追问,kmeans的流程,NMS(非极大值抑制)的流程
简述CNN中归一化技术
深度学习,问 FPN 怎么实现了。 FPN 是怎么设计的
研究方向(针对自身实际情路以及面试岗位回答哦)
你知道几种卷积,他们的作用都是什么
算法题:yolov3和yolov4及yolov5的优缺点 你们是怎么评估选择yolov3的。
目标检测中如何计算AP
多分类问题,样本不均衡,可以有哪些方法来解决?
为什么LSTM使用sigmoid和tanh作为激活函数 -
LSTM能不能把tanh换成ReLU??
Layer normalization 和 batch normalization 在训练阶段和推理阶段参数量要如何计算?
BERT具体如何做Tokenizer的?
BERT如何有效处理长文本序列?
简历中每个项目的loss function 和 评价指标是什么???
set()是如何去重的,他是如何实现的?
Precision 和 Recall有什么区别??是如何计算的?以及F1 Score是什么?
Python深度拷贝和浅拷贝有什么区别???哪些操作是深度拷贝,哪些操作是浅拷贝
对比下YOLO和Faster RCNN
简述一下SEnet的图像注意力
简述一下关于CenterPoint方法的思路,anchor-based和anchor-free方法的比较
简述yolo的原理
简述IOU是什么
过拟合的方差和偏差是什么情况?
过拟合有什么解决方法
做过项目的相关情况
请简述SSD
BN层的作用有哪些
谈谈YOLO V5的网络结构模型
简述一下Deep Learning
常见的预训练模型的自监督任务的loss function 和 评价指标是什么?如BERT、GPT-3
推荐系统的常见的评价指标有哪些?他们有哪些异同?
请简述CELoss
简述一下NMS
项目相关的问题,项目遇到的困难,如何解决,学习的方法
如何理解感受野
FPN特征金字塔模型 相比ViT这种直筒型的结构 为什么更适用于下游任务?
常用的数据增广方式有哪些?具体说说mixup和cutmix
说说正则化在模型训练中的作用
简述一下MPC原理
你遇到过什么人工智能算法的难题么是怎么解决的
什么是人工智能
人工智能未来发展趋势你是怎么看的
项目经验:你在项目中遇到的难点是什么,以及怎么处理的。
Pytorch中nn.Module与nn.functional有什么区别。
Pytorch中collate_fn函数的作用。
ROC曲线是怎么做出来的
讲一下ROI Align和ROI Pooling的原理?ROI Align和ROI Pooling相比,有什么改进?
1*1卷积的好处是什么?
为什么sigmoid激活层会梯度消失
你觉得深度学习一定比传统cv算法好么?
什么时候用GPT什么时候用bert?
self attention你了解过什么post和post norm
SLAM技术领域中,SFM主要有几种方式,对比优缺点,当下主要用其中的那种形式?
解释混合高斯模型含义。解释EM算法的原理。
说明NDT的详细过程,Normal distribution的含义是什么?
说明ICP的详细过程,要求说明代数解法和匹配问题解法。
如何代码实现计算旋转点云
点云去畸变有哪些方法
数据集预处理
【选择题】以下哪几个选项是三维点云的特征描述子( ) A. VFH B. FPFH C. ICP D. superpoint
请简述三种不同的激光点云匹配算法
常用的点云配准算法有哪些,这些算法的原理是?
手写点云欧式聚类
举出常见的点云的registration方法。
稀疏点云地图与稠密点云地图都有哪些用处?
pointnet++做点云分割的时候为什么需要进行上采样
大津法(OSTU算法)阈值分割中,阈值自动选择的思路是什么?
CTC尖峰延迟的原因是什么
关键词增强技术,基于有限状态机匹配的方法(Wenet Context Biasing)有什么问题;
介绍一下Chain模型
讲一下CTC中的前后向算法
Kaldi里面预训练中生成的tree是做什么的
之前选择Kaldi没有选择端对端语音识别的原因
长音频切割的实现过程
HCLG的每一层分别是什么
简述卡兹平滑的具体原理是什么
列举一些LM的平滑算法
CTC的训练方法是什么
MFCC特征提取的过程,每一步的具体作用
残差网络的作用是什么
Wenet中Conformer的解码方式
Transformer 结构及细节
介绍 e2e 语音识别方案
列举一些
语音识别工具包
HMM-GMM到HMM-DNN在网络结构上有什么区别
简述部署方案及性能
YOLO的Dataset有哪几个函数
目标跟踪算法你了解哪些?meanshift算法如何提升目标移出视野后回来再次捕获的精度?
yolov5和直接的比提升效果的部分主要是哪几块
深度学习目标检测算法有哪些?具体说一个你熟悉的?
如何提高小目标检测?
YOLOv4相较于YOLOv3有哪些改进?速度更快还是更慢,为什么?
举出几种光流方法(LK,HS等)。说明LK光流的建模方式。
目标检测方向AI应用快速开发
你实现的目标检测项目的指标怎么样?
目标检测的评估,解释一下mAP的含义
光流适合在室外使用吗?为什么?
光流法和直接法的区别
比较熟悉的目标检测网络,还知道哪些别的方法
详细讲一下RNN、Fast-RCNN、Faster-RCNN算法的原理?不同算法之间的区别?
光流实现原理,为什么要用金字塔
光流跟踪在快速运动过程中,跟踪容易失败,采取什么方法?
边缘检测算子中,实验复杂程度最高的是什么?
语义分割常用的损失loss有哪些, 公式和优缺点?
语义分割中标签表示:poly多边形 mask掩码图和rle 表示分别都是什么?各有什么特点。
相机内参和外参的含义?如果将图像放大两倍,内外参如何变化?
简述一下单应矩阵、基础矩阵、本质矩阵的定义?
Eigen中矩阵求逆,用了哪些数学上的技巧?
简述D3QN原理
简述一下MPC原理
介绍一下非极大值抑制NMS及其变体
简述一下Getitem的传入的是什么
简述一下CBAM
简述一下模型大小、帧率
关键点有没有特殊要求(遮挡怎么处理)
正负样本不均衡应该如何操作
如何提高标定精度
简述一下立体视觉的实现原理
SIFT的原理,SURF的原理,SIFT尺度不变性的原理,SURF相对于SIFT的改进点。
列举几个你知道的卷积类型。
说一下SVM的原理和优缺点等等
解释一下核函数,以及用过什么核函数
简述一下什么是SVM?
职业规划
三个词概括个人性格特点
自我介绍及简历项目介绍
说说图像处理常见评价指标
多元线性回归之前做了哪些预处理
解释一下Mobilenetv1-3的网络结构
简述一下Deeplab系列网络结构
匹配问题除了最近邻还有什么解法?说明匈牙利算法、最大流/最小割、谱方法等其中一种。
给定一组点,如何计算其拟合平面?如何计算其拟合直线?解释其方法的意义。
说一下Sfm定义是什么
简述一下手眼标定的方法,解释原理
说一下使用的标定方法
简述一下八点法原理与过程
极线是什么?对极约束是什么?描述了什么几何关系?
径向和切向畸变模型含义,鱼眼模型含义(回答等距投影模型即可)?

扫描二维码
如你近期刚面试完,请扫码添加小编投稿面试题,每道题可兑换5元哦
投稿面试题、面经、深蓝课程学后感都可以。
编辑题目
题干
解题思路
设置题目所属题包
- 传统机器学习
- 数据分析与挖掘
- 仿真系统
- C++
- HR及非技术问题
- 自动驾驶
- 基础架构
- 决策规划控制
- 定位建图
- 环境感知
- 强化学习
- 深度学习
- 传统机器学习
- 三维重建
- 三维点云
- 三维物体分割
- 语音识别
- 图像视觉检索理解
- 目标跟踪
- 目标分割
- 物体检测
- 计算机视觉
请选择题目所属岗位(请最多选择6个)
请选择题目所属公司
- 文远
- 图森未来
- 阿里高德
- 智加科技
- 蔚来汽车
- 小米汽车
- 上海人工智能研究院
- 商汤绝影
- 商汤研究院
- 速腾聚创
- 鉴智机器人
- 哪吒
- 新石器
- 理想
- 零跑
- 智行者
- 旷视科技
- 易华录
- 未知公司
- SLAM算法实习工程师
- SLAM算法工程师
- 蔚来提前批
- 亚马逊
- 腾讯云一面
- 上海仙途智能+
- 地平线实习
- 规划控制实习岗
- 小马智行
- 华为车bu
- 美团无人机
- 镁佳科技
- 禾赛
- 定位算法工程师
- 智加
- C++开发岗
- 安克科技
- 新能车辆
- 石头科技
- 机器人SLAM算法
- 斑马
- AutoX
- SLAM算法工程师
- 轻舟智航
- 追觅科技
- 滴滴出行
- 华人运通
- 驭势科技
- 小鹏
- 安路科技
- 江西上大企业服务有限公司
- 规划控制岗
- 亿可能源
- 上汽
- 柏楚电子
- 寻迹智行
- 集度汽车
- 上汽乘用车智驾中心
- 易控智驾
- 新能车辆
- 昆山鲲鹏无人机科技有限公司
- 天瞳威势电子科技有限公司
- 擎朗机器人
- 商汤科技
- 视源股份有限公司
- 西井科技
- 禾多科技
- 规划控制算法工程师
- 奇瑞新能源-智能网联部
- 诺亚机器人
- 小鹏汽车
- 元戎启行
- 极智嘉
- SLAM定位建图
- slam 定位建图
- 擎朗智能
- aibee
- oppo研究院
- 希迪智驾
- 吉利汽车研究院
- 九耀智能
- 麦岩智能
- 东软瑞驰
- 斑马网络
- SLAM算法岗
- 小鹏 蔚来 滴滴
- 视觉SLAM实习生
- 上海影创
- SLAM算法工程师
- 达闼科技
- 文远知行
- 嬴彻
- 其域创新科技
- 视觉SLAM算法,VR头显
- 爱奇艺
- Nreal
- 毫末
- 毫末智行
- 路特斯
- 快仓智能
- 安克创新
- 零零无限
- 字节跳动pico
- 其域创新
- SALM岗
- 光鉴科技
- 激光SLAM工程师
- AutoX
- 激光SLAM 融合定位 工程师
- 字节
- 银星智能
- SLAM算法工程师
- 高仙
- SLAM工程师
- 普渡科技
- momenta
- 大华技术
- 长安汽车
- SLAM岗
- 小派科技
- 甲壳虫智能(技术面)
- SLAM算法实习生(定位建图)
- 苏州追觅科技有限公司
- SLAM定位建图
- 美行智能网联汽车技术有限公司
- 立得空间
- 视觉SLAM研发工程师(定位建图)
- 亿航智能
- SLAM算法
- 科沃斯机器人股份有限公司
- 旷视
- 字节跳动 校招
- 格力
- 积木易搭
- SLAM算法实习生
- 上海人工实验室
- 亿嘉和
- pony.ai
- 邦鼓思电子科技(做草坪机器人领先的公司)上海
- 博世
- 感知算法
- 百度一二三面
- 星猿哲科技
- 激光SLAM
- 城事之光
- 高德、百度、旷视
- SLAM算法岗
- Momenta
- SLAM中级算法工程师
- 大疆
- 大疆
- 四维图新 自动驾驶事业部
- 上海的星猿哲机器人公司
- 宝时得科技
- 迦智科技
- 哲库+虹软
- 思岚科技
- 禾多科技
- 网易伏羲机器人
- CV算法
- 海康威视
- 微创机器人
- 海康威视
- 大华
- 阿里巴巴达摩院
- 启元实验室
- 字节跳动杭州
- 仙途
- 蔚来
- 小米
- 新国都
- 上汽零束
- 青岛科捷智能科技股份有限公司
- 高仙机器人
- SLAM算法岗位
- 影创科技
- 泉州哈工大工研院
- 滴滴
- 视觉SLAM算法
- 诠视科技
- 美的
- 美团
- 科大讯飞
- 虾皮
- 地平线
- 语音识别岗位
- 阿里
- 趣丸
- 商汤
- 上海端方智能科技
- 字节
- 华为
- 百度
- 视觉SLAM算法工程师
- 字节跳动
- V SLAM方向
- 网易
- 深兰科技
- 远度科技
- 字节pico
- 星制科技
- 非夕科技
- 锐捷
- 虹软
- 中科院自动化研究所
- 三一重工
- 深圳湾实验室
- 华兴证券
- 深圳锐明技术
- 苏州全视智能
- 梅卡曼德(相机组)
- 理想汽车
- 未知
- SLAM岗位
- dreame
解题思路解锁方式
您还有0次解锁机会,是否解锁本题思路?












 官方微信公众号
官方微信公众号
 扫码下载APP
扫码下载APP